
sales06@switek.biz

+86 186 5927 5869

Subscribe to Us
sales06@switek.biz
+86 186 5927 5869
Subscribe to Us
Palabras clave: Robot IML; Operación de robot IML; Robótica de etiquetado en molde
En "Enseñanza" puede revisar y editar el programa del robot IML. Al ser un sistema de control modular, tras seleccionar el modo, configurar los parámetros, el temporizador y el contador, obtendrá un programa inicial para su proyecto IML. En la página "Enseñanza", puede realizar pequeños ajustes al programa para que el robot IML funcione de forma más eficiente.
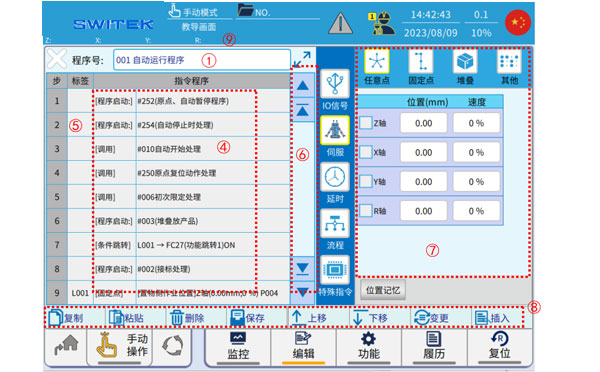
Descripción de cada área de marcado:
| No. | Nombre | Función |
|---|---|---|
| (1) | Seleccionar/Visualizar programa | Haga clic en la ventana emergente "Lista de programas", seleccione el número de programa que desea agregar, editar o ver y haga clic para ingresar a la interfaz de edición. |
| (2) | Visualización de la extensión del programa | Haga clic en  para acceder a la interfaz extendida del programa y ver fácilmente el contenido completo del comando. para acceder a la interfaz extendida del programa y ver fácilmente el contenido completo del comando. |
| (3) | Devolver | Haga clic para salir de la interfaz de edición del tutorial. Si se ha modificado el programa, se solicitará la compilación. |
| (4) | Contenido de la instrucción | Se muestra el contenido del comando. |
| (5) | Columna de etiquetas | Vaya al área de edición de la pestaña. Haga clic para agregar una etiqueta antes de la línea de comando (al crear una etiqueta nueva, puede hacer clic en "EN" sin introducir un número; se agregará automáticamente un número de etiqueta sin usar). |
| (6) | Una lista de instrucciones de primer nivel |
|
| (7) | Lista secundaria de comandos y configuración de parámetros | Edición de comandos de sublista y configuración de parámetros. |
| (8) | Atajos de edición de comandos |
|
| (9) | Visualización de la posición del eje | Se muestra la posición actual de cada eje para una fácil observación. |
A continuación se detalla cómo "enseñar" un programa de robot IML:
Haga clic en el área de visualización del nombre del programa para ingresar a la lista de programas.
La interfaz es la siguiente:
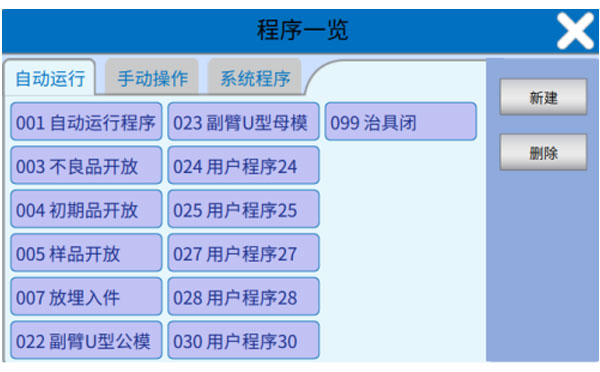
Ejecución automática (001-099): 001 es el programa principal que puede ser editado por el usuario, 024-083 son subrutinas creadas y editadas por el usuario.
Operación manual (#178-#249):
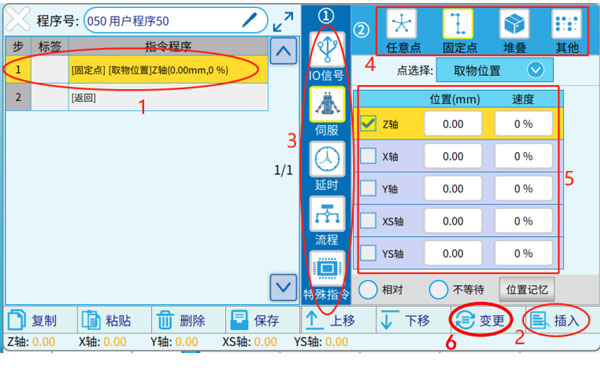
La interfaz de edición es como se muestra en la figura anterior, y la nueva línea de comando se divide en los siguientes 6 pasos:
A continuación se muestran algunos de los comandos más utilizados:
Al enseñar programación de aplicaciones, no se recomienda que los usuarios editen la lógica básica de los puntos X e Y para el control de E/S estándar de la máquina de moldeo por inyección y el manipulador (en este caso, robot IML), sino que invoquen la subrutina de función del sistema para garantizar la precisión del programa. Estas subrutinas se ubican en la clase "Señales de E/S".
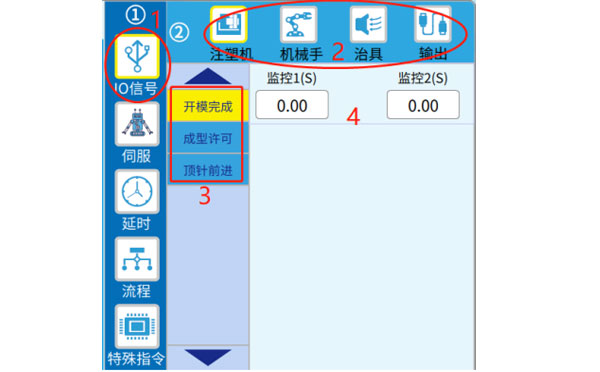
Como se muestra en la figura anterior, los pasos de programación se configuran paso a paso según 1 (Categoría principal), 2 (Subcategoría), 3 (Instrucciones específicas) y 4 (Parámetros específicos). Una vez completados, haga clic en "Cambiar" o "Insertar".
Al editar las funciones de conveniencia relacionadas con el robot IML, puede usar los botones de la siguiente figura para operar las plantillas relacionadas con el robot IML (puede observar el encendido/apagado de la señal de detección activando o desactivando el punto a la derecha).  ). Esto facilita la programación de simulaciones en escenarios operativos reales.
). Esto facilita la programación de simulaciones en escenarios operativos reales.

Para editar la lógica de salida del punto de E/S, la interfaz de edición es la siguiente:
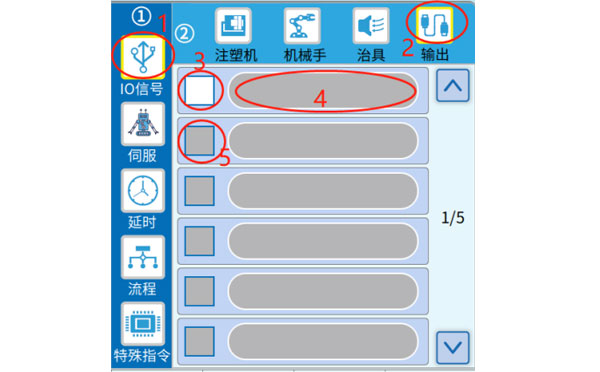
En la interfaz de edición de la figura anterior, haga clic en la etiqueta número 3 a √; la marca 4 se vuelve editable. Seleccione el punto Y activado o desactivado que se va a generar y confirme. Si desea generar simultáneamente los puntos Y del robot IML, en el designador 5, √ para comenzar a editar la salida del segundo punto Y. Al terminar, haga clic en "Cambiar" o "Insertar".
Edite los comandos de movimiento del servoeje, incluyendo el movimiento a un punto fijo (el punto está definido, se puede modificar en "Ajuste de posición" y se puede referenciar), cualquier punto, un punto apilado (la posición se establece en "Apilado" en el menú), y el comando de retorno del eje al origen, etc. Tomemos un punto fijo como ejemplo:
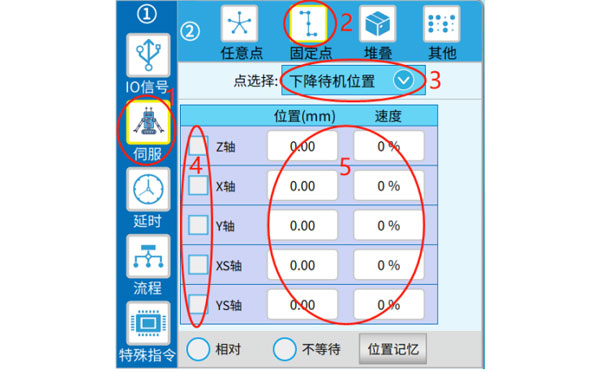
Como se muestra en la figura anterior, seleccione el punto específico en la etiqueta 3, luego seleccione el eje que se ejecutará en la etiqueta 4 y configure el punto y la velocidad en la etiqueta 5. Cuando termine, haga clic en "Cambiar" o "Insertar".
Hay dos tipos de comandos de edición de retardo: especificar el tiempo y especificar el temporizador (el tiempo del temporizador se puede cambiar cuando se ejecuta automáticamente).
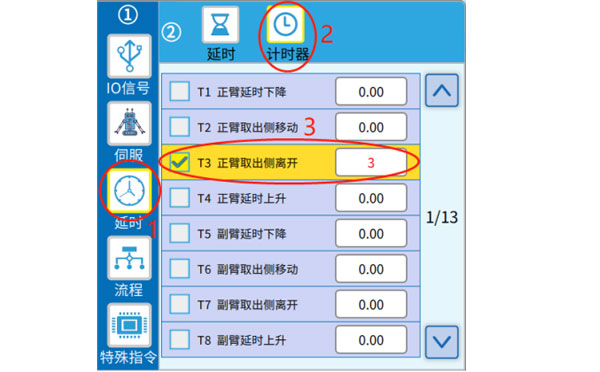
Nota: Si desea utilizar un temporizador al enseñar programación, prefiera los modelos T85-T100, que son temporizadores de usuario que no están definidos específicamente.
Tanto la invocación como el inicio del programa son formas de usar subrutinas. La diferencia radica en que, cuando se llama a una subrutina, esta espera a que finalice la ejecución de la instrucción (hasta la instrucción "return"). La llamada se considera completa y la siguiente instrucción puede ejecutarse en el programa principal. Por otro lado, no es necesario esperar a que se ejecute el subprograma de inicio, ya que se puede iniciar directamente el siguiente paso del programa principal (el programa principal y el subprograma se ejecutan en paralelo).
Los pasos para editar el comando de inicio del programa son los siguientes:
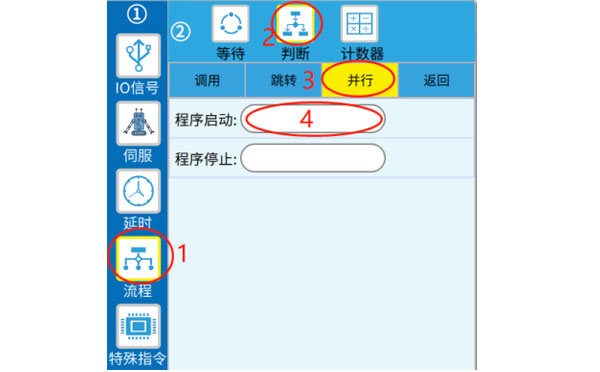
Nota: El programa inicia el subprograma abierto, que puede cerrarse con la opción "Detener programa" mencionada anteriormente (en circunstancias normales, el subprograma se cerrará automáticamente una vez completada la ejecución y se alcance la instrucción "Retorno"). Los pasos para editar el comando de invocación son los siguientes:
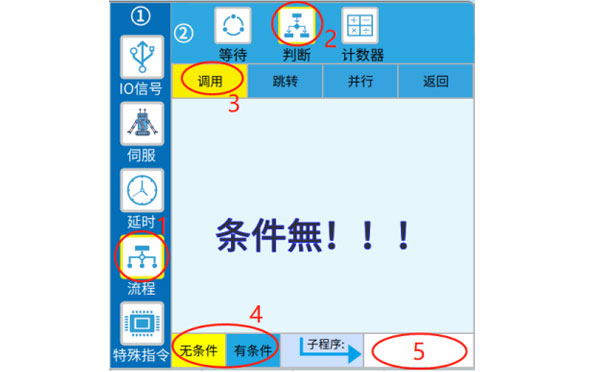
Como se muestra en el ícono número 4 arriba, al editar la instrucción de llamada, puede elegir si desea establecer la condición. Seleccione "Incondicional" y, a continuación, configure el número de subrutina que se llamará en la marca 5 para completar la llamada. Si selecciona "Condicional", primero debe configurar la condición, luego configurar el número de programa en la etiqueta 6 y hacer clic en "Cambiar" o "Insertar".
Tenga en cuenta que cuando el juicio condicional anterior no es verdadero, la llamada subsiguiente no se ejecutará, pero se iniciará la siguiente línea de instrucciones.
Comando de salto: el programa se ejecuta hasta el comando de salto y el siguiente paso ejecutará la línea de comando con la etiqueta correspondiente, en lugar de ejecutarla en el siguiente orden.
Salto/salto condicional, los pasos de edición del comando son los siguientes:

Seleccione si desea establecer condiciones en la etiqueta 4, en la etiqueta 5 (puede establecer varias), en la etiqueta 6 y seleccione "Cambiar" o "Insertar" para generar comandos. A continuación, complete la columna de etiqueta que se muestra en la etiqueta 7, antes de la línea de comando de destino.
Si se utiliza un salto condicional, la condición anterior no es válida y el salto posterior no se ejecuta. La siguiente línea de instrucciones se iniciará directamente. Si la condición es verdadera, se ejecuta la línea de comando que salta a la etiqueta.
La salida de la bandera interna es ON/OFF, y el procedimiento de edición se muestra en el número de ícono a continuación.
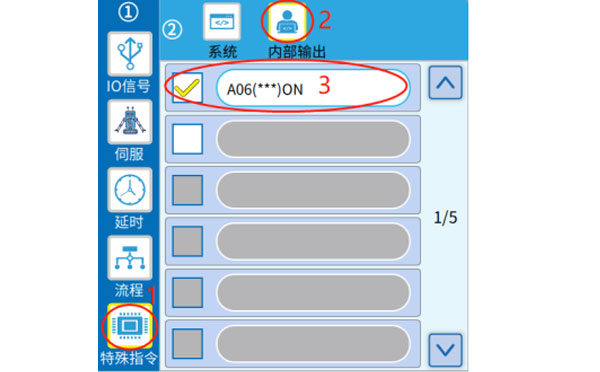
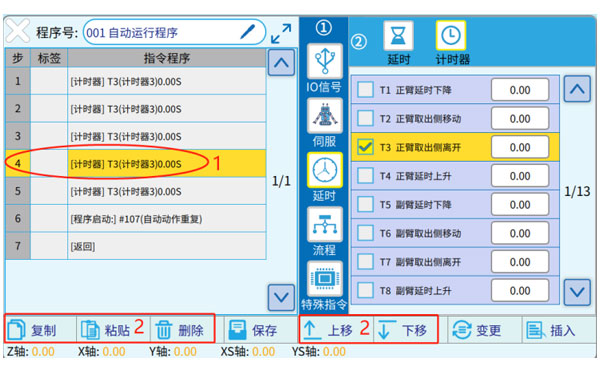
Como se muestra en el ícono 1 arriba, seleccione la línea de comando que desea editar (se volverá amarilla) y luego use el botón en la etiqueta 2 para realizar la operación.
Las funciones de cada botón son las siguientes:
Una vez editado el programa, puede hacer clic en "Guardar" o " " o ir a otras páginas de configuración para activar el mensaje "Compilación", hacer clic en "Sí" y esperar a que se complete la edición (se guardará automáticamente después de la compilación).
" o ir a otras páginas de configuración para activar el mensaje "Compilación", hacer clic en "Sí" y esperar a que se complete la edición (se guardará automáticamente después de la compilación).

Cambie el botón en la esquina superior izquierda de la consola de programación a AUTO para acceder a la interfaz de operación automática. Vaya a la programación, como se muestra a continuación, y haga clic en el icono "" que se muestra en la etiqueta 1 para acceder a la pantalla extendida. Haga clic en la etiqueta 2 "Paso único" para acceder al modo de paso único. Presione el botón " " una vez y el programa pasará a 1 paso.
" una vez y el programa pasará a 1 paso.
El progreso del programa se puede ver en el número 4. "N.° de programa" es el número del programa que se está ejecutando y "N.° de paso" es el número del programa que se está ejecutando.

Email: sales06@switek.biz


Contacto SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right





