
sales06@switek.biz

+86 186 5927 5869

Subscribe to Us
sales06@switek.biz
+86 186 5927 5869
Subscribe to Us
Palabras clave: Robot IML; Operación de robot IML; Robótica de etiquetado en molde
El "Monitor", del que hablamos aquí, es donde comprenderá claramente el funcionamiento del brazo robótico. En la página del monitor, puede comprobar la señal del brazo robótico, el extremo del brazo (EOAT), la máquina de moldeo por inyección, el estado de funcionamiento del servomotor y el sistema de control del robot IML para un diagnóstico rápido de cualquier punto de falla del sistema.
Haga clic en el icono  y aparecerá la siguiente página: la página de monitoreo:
y aparecerá la siguiente página: la página de monitoreo:

| No | Nombre | Función |
|---|---|---|
| (1) | Robot/Plantilla/IMM | IO muestra la categoría, haga clic para cambiar rápidamente a la página de señal correspondiente. |
| (2) | Página | Haga clic para cambiar a la página de E/S |
| (3) | Pantalla IO | Visualización de encendido y apagado en tiempo real de todos los puntos de entrada y salida actuales. |
| (4) | Monitoreo de unidades | Visualización en tiempo real de la velocidad, el par, la tasa de carga y la desviación de cada servomotor del eje. |
| (5) | Monitoreo interno | Visualización en tiempo real del estado de E/S interna. |
Utilice (1) o (2) para cambiar la pantalla IO y la luz frontal se enciende para indicar que la señal está activada.
3.5.2 Monitoreo de la unidad
Valores en tiempo real
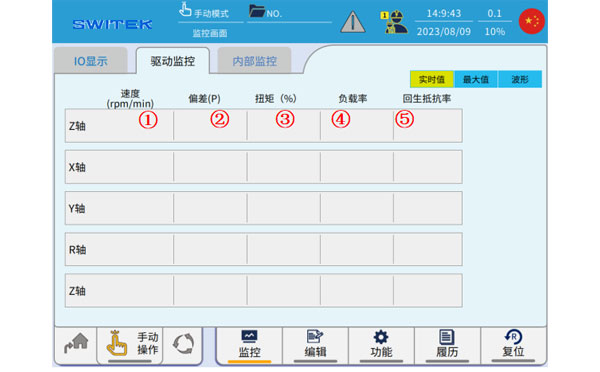
| No | Nombre | Función |
|---|---|---|
| (1) | Velocidad (rpm/min) | Visualización en tiempo real de la velocidad de ejecución de cada eje. |
| (2) | Desviación (P) | Visualización en tiempo real de las desviaciones en cada eje. |
| (3) | Par motor (%) | Visualización porcentual del par en tiempo real para cada eje. El par instantáneo del servomotor puede alcanzar hasta el 300 % del par nominal. |
| (4) | Factor de carga | Visualización en tiempo real del factor de carga operativa de cada eje. (100% máximo) |
| (5) | Tasa de resistencia a la resiliencia | Visualización en tiempo real de la tasa de carga de la resistencia de reaparición. |
Máximo

| No | Nombre | Función |
|---|---|---|
| (1) | Velocidad máxima de avance | Un registro de la velocidad máxima de cada eje a medida que se mueve en la dirección positiva. |
| (2) | Velocidad máxima negativa | Un registro de la velocidad máxima de cada eje que se mueve en dirección negativa. |
| (3) | Desviación máxima positiva | Registra la desviación máxima de cada eje en la dirección positiva. |
| (4) | Desviación máxima negativa | Un registro de la desviación máxima de cada eje en la dirección negativa. |
| (5) | Par máximo hacia adelante | Un registro del par máximo de cada eje a medida que se mueve en la dirección positiva. |
| (6) | Par máximo negativo | Un registro del par máximo de cada eje cuando se mueve en la dirección negativa. |
| (7) | Reiniciar | Se borra el valor máximo registrado previamente. |
Forma de onda
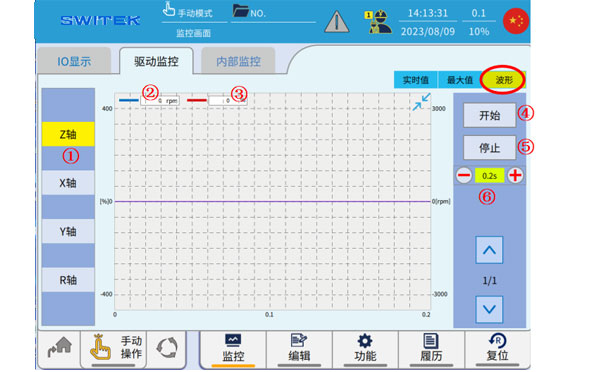
| No. | Nombre | Función |
|---|---|---|
| (1) | Selección de eje | Haga clic para seleccionar el eje que desea mostrar. |
| (2) | Par motor (%) | La curva de forma de onda azul muestra la variación del par. El par instantáneo del servomotor puede alcanzar hasta el 300 % del par nominal. |
| (3) | Velocidad (rpm/min) | La curva de forma de onda roja muestra el cambio en la velocidad. |
| (4) | Comenzar | Después de seleccionar el eje (1), haga clic en "Iniciar" para iniciar el muestreo de la forma de onda. |
| (5) | Detener | Detener el muestreo de forma de onda |
| (6) | La forma de onda muestra la escala. | Haga clic en "+" y "-" para acercar o alejar la forma de onda mostrada. |
3.5.3 Monitor interno
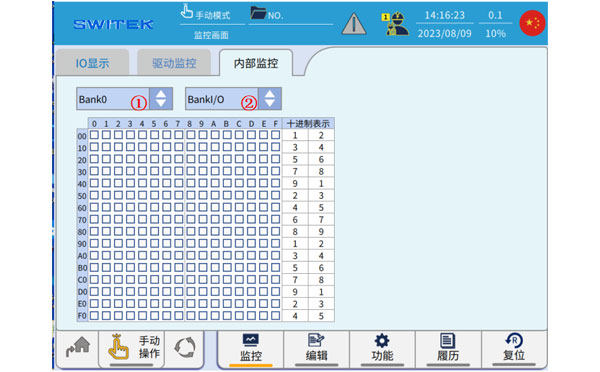
"Monitoreo interno" se refiere al monitoreo del encendido/apagado de la posición de la bandera interna del controlador, que se divide en 5 unidades en blanco *2, un total de 10 áreas, y la conmutación entre banco y unidad se completa a través de (1) y (2).
Email: sales06@switek.biz


Contacto SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right





