
sales06@switek.biz

+86 186 5927 5869

Subscribe to Us
sales06@switek.biz
+86 186 5927 5869
Subscribe to Us
Palabras clave: Robot IML; Operación de robot IML; Robótica de etiquetado en molde
La configuración de los parámetros mecánicos del robot IML incluye la selección del módulo de la unidad funcional, los parámetros mecánicos del eje, el servomotor, etc., para garantizar que el robot IML funcione de forma segura y eficiente.
Selección de modelos

| No. | Nombre | Función |
|---|---|---|
| (1) | Selección de modelos | Haga clic aquí para seleccionar el nombre del modo aplicable. |
| (2) | Ahorrar | Después de seleccionar (1) el modelo, haga clic en “Guardar” para confirmar la operación. |
| (3) | Se muestra la información del modelo seleccionado | La sección de información se muestra para los modelos para ayudarle a distinguirlos. (Esta parte de la información del modelo debe mantenerse durante la producción para garantizar su precisión). |
Tenga en cuenta que la operación anterior (selección de modelo y guardado) no se aplica inmediatamente después de completar el contenido del modelo. Es necesario inicializar los parámetros mecánicos y del servo, guardar los parámetros y reiniciar el sistema para que surtan efecto.
Parámetros mecánicos

| No. | Nombre | Función |
|---|---|---|
| (1) | Inicializar | Al hacer clic en él, se leerán los datos iniciales de los parámetros mecánicos en el archivo del modelo y se enviarán a la pantalla en (4). |
| (2) | Ahorrar | Guardar los cambios existentes |
| (3) | Página | Los parámetros se desplazan hacia arriba y hacia abajo. |
| (4) | Contenido de parámetros mecánicos |
|
Tenga en cuenta que la modificación de los parámetros anteriores no tiene efecto inmediato, sino que debe guardarse y solo surtirá efecto después de reiniciar el sistema.
Parámetros de la unidad

| No. | Nombre | Función |
|---|---|---|
| (1) | Inicializar | Al hacer clic en él, se leerán los datos iniciales de los parámetros de la unidad en el archivo del modelo y se enviarán a la pantalla en (4). |
| (2) | Ahorrar | Guardar los cambios existentes. |
| (3) | Página | Los parámetros se desplazan hacia arriba y hacia abajo. |
| (4) | Contenido de los parámetros de la unidad | Se edita y se muestra cada parámetro del controlador. |
Instrucciones para configurar algunos parámetros de la unidad:
| No. | Nombre | Efecto | Valor inicial | Rango | Unidad | El punto principal del escenario | |
|---|---|---|---|---|---|---|---|
| PA1-02 | Selección del sistema INC/ABS | Reiniciar | 0 | 0~1 | "0" es un motor incremental, "1" es un motor absoluto | ||
| PA1-04 | Dirección de rotación | Reiniciar | 0 | 0~1 | Ajustar cuando el motor gira en la dirección incorrecta | ||
| PA1-13 | Modo de sintonización | Tiempo real | 0 | 0~2 | 0 es automático, 1 semiautomático, 2 manual. El robot se envía configurado en 1. | ||
| PA1-14 | Relación carga-par | Tiempo real | 23.0 | 0.0~300 | Veces | ||
| PA1-15 | Ganancia de sintonización | Tiempo real | 7 | 1~40 | |||
| PA1-27 | Valor límite de par delantero | Tiempo real | 300 | 0~500 | |||
| PA1-28 | Valor límite de par negativo | Tiempo real | 300 | 0~500 | |||
| PA1-52 | Ajuste de S acc/dcc | Tiempo real | 0.0 | 0.0~1000.0 | |||
| PA1-54 | Un número fijo de respuestas de comando de posición | Tiempo real | 30.0 | 0.00~250.00 | |||
| PA1-55 | Ganancia del anillo de posición 1 | Tiempo real | 17 | 1~2000 | |||
| PA1-56 | Ganancia del anillo de velocidad 1 | Tiempo real | 5 | 1~2000 | |||
| PA1-58 | Ganancia de retroalimentación 1 | Tiempo real | 0.000 | 0.000~1.500 | |||
| PA1-59 | Filtrado de par | Reiniciar | 0.00 | 0.00~20.00 | |||
| PA1-70 | Modo de filtro de muesca | Tiempo real | 1 | 0~1 | Cuando es 0, la detección automática 1 es válida para el valor establecido | ||
| PA1-71 | Número de frecuencia de la muesca 1 | Tiempo real | 134 | 10~4000 | |||
| PA1-72 | Atenuación de la muesca 1 | Tiempo real | 1 | 0~40 | |||
| PA1-73 | Ancho de muesca 1 | Tiempo real | 2 | 0~3 | |||
| PA1-74 | Número de frecuencia de muesca 2 | Tiempo real | 53 | 10~4000 | |||
| PA1-75 | Atenuación de muesca 2 | Tiempo real | 1 | 0~40 | |||
| PA1-76 | Ancho de muesca 2 | Tiempo real | 2 | 0~3 | |||
| PA1-78 | El número de frecuencia 0 de la antirresonancia de frenado | Tiempo real | 7.0 | 1~300.0 | Hz | La supresión de vibraciones es efectiva al detenerse y es necesario medir la vibración real antes de realizar la configuración. | |
| PA1-79 | Relación de inercia de la vibración del freno | Tiempo real | 0 | 0~80 | Si se establece en 0, PA1-78 no será válido, y cuando se establece en 1, PA1-78 será válido. | ||
| PA1-80 | La frecuencia número 1 de la antirresonancia de frenado | Tiempo real | 8.0 | 1~300.0 | Hz | La supresión de vibraciones es efectiva al detenerse y es necesario medir la vibración real antes de realizar la configuración. | |
| PA1-81 | Relación de inercia de la vibración del freno | Tiempo real | 0 | 0~80 | Si se establece en 0, PA1-80 no es válido, y cuando se establece en 1, PA1-80 es válido. | ||
| PA1-94 | Modo de filtro de par | Reiniciar | 0 | 0~1 | Establezca en 0 y no utilice filtrado de par | ||
| PA2-64 | Tiempo de acción de Brakek | Tiempo real | 0 | 0.00~99.9 | Sec | ||
| PA2-65 | Selección de resistencia retrógrada | Reiniciar | 1 | 0~1 | Establezca 1 cuando la resistencia de regeneración esté conectada y 0 cuando no esté conectada | ||
| PA2-69 | Desviación sobre el valor detectado | Tiempo real | 15.0 | 0.1~100.1 | Rev | ||
| PA3-79 | Ajuste del valor de impedancia retrógrada | Tiempo real | 30.0 | 3.9~160.0 | Ω | Se establece el valor de la resistencia regenerativa | |
| PA3-80 | Ajuste de potencia de impedancia de reaparición | Tiempo real | 40 | 1~5000 | W | Fijación de capacidad de resistencia retroactiva | |
Modo de configuración y ajuste sencillo

| No. | Nombre | Función |
|---|---|---|
| (1) | Selección de eje | Haga clic para seleccionar el eje en el que desea trabajar. |
| (2) | Auto-tune | Cuando la máquina se ajusta antes de salir de fábrica, los parámetros de accionamiento se pueden deducir en este modo. |
| Sintonización semiautomática | Modo de ajuste semiautomático, algunos parámetros son fijos y otros se ajustarán con precisión. | |
| Sintonización manual | Todos los parámetros de la unidad son fijos. | |
| (3) | Establecer valor | La relación ganancia-inercia-par ajustada actualmente en uso. |
| (4) | Valor calculado | El valor derivado del cálculo actual. |
| (5) |  | Aplicar el contenido del Valor calculado al Valor establecido. |
| (6) |  | Aplicar el contenido del “Valor establecido” al “Valor calculado”. |
| (7) | Ahorrar | Modificar y guardar los parámetros del controlador actual. |
En modo automático, puede cambiar el modo de ajuste de cada eje en esta interfaz, modificar la relación inercia-par y la ganancia de ajuste, para observar el efecto operativo de los valores establecidos en tiempo real y encontrar configuraciones de parámetros más razonables.
Cuando se configura en modo de ajuste automático, la relación inercia-par del parámetro PA1-14 se mide en tiempo real.
La función principal del modo de ajuste automático es ajustar automáticamente el valor según el efecto de funcionamiento cuando los parámetros de conducción adecuados no se conocen en la etapa inicial de depuración, hasta que el efecto de funcionamiento sea bueno y estable, y el valor de la relación inercia-par tienda a ser constante.
Cuando el rendimiento sea estable, cambie al modo de ajuste semiautomático, configure manualmente los parámetros, guárdelos, apague el motor y reinícielo antes de que surtan efecto. En el modo de ajuste semiautomático, los parámetros principales, como la relación de par de inercia, se fijarán, y algunos parámetros del servo se ajustarán en tiempo real para garantizar un funcionamiento fluido.
Al configurar el modo de ajuste manual, todos los parámetros del servo son fijos. Este modo requiere un alto grado de precisión en los parámetros configurados.
Configuración sencilla: configuración del filtro de muesca

| No. | Nombre | Función |
|---|---|---|
| (1) | Selección de eje | Haga clic para seleccionar el eje en el que desea trabajar. |
| (2) | Filtrado adaptativo | Función de filtrado adaptativo conmutación ON/OFF. |
| (3) | Parámetros relacionados con el filtrado de muesca | Varios parámetros relacionados con la función de filtrado de muesca. |
Si se produce un sonido agudo con el servo encendido, ya sea en ese momento o durante el funcionamiento, se puede activar el filtro adaptativo, lo que eliminará automáticamente el sonido anormal causado por la resonancia mecánica y puede eliminar dos puntos de resonancia. Cuando la frecuencia de resonancia se establece en 4000, no hay punto de resonancia.
Fácil configuración: configuración del control de vibración
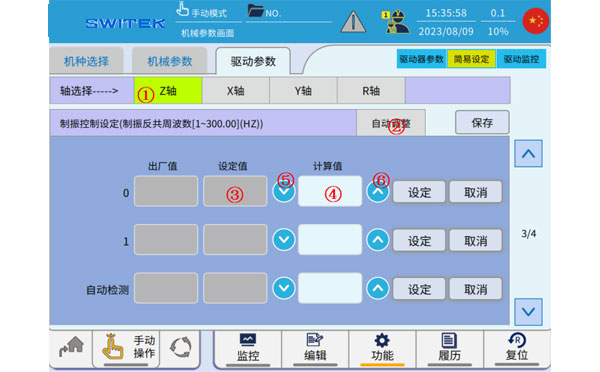
| No. | Nombre | Función |
|---|---|---|
| (1) | Selección de eje | Seleccione el eje que desea operar. |
| (2) | Ajuste automático | Los parámetros relevantes del control de vibración establecido se detectan automáticamente. |
| (3) | Establecer valor | Parámetros de control de vibraciones actualmente en uso. |
| (4) | Valor calculado | Calcular el valor numérico derivado. |
| (5) | | Aplicar el contenido del Valor calculado al Valor establecido. |
| (6) | | Aplicar el contenido del “Valor establecido” al “Valor calculado”. |
Ajuste del control de vibración: Suprime eficazmente la vibración al detenerse. El valor de ajuste general es de 5 a 10. Este valor se puede calcular rápidamente a partir de la forma de onda del par, pero es difícil ajustarlo correctamente la primera vez.
Fácil configuración: detección de colisiones

| No. | Nombre | Función |
|---|---|---|
| (1) | Selección de ejes | La selección del eje a configurar |
| (2) | Variación máxima del par |
Email: sales06@switek.biz


Contacto SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right





