
sales06@switek.biz

+86 186 5927 5869

Subscribe to Us
sales06@switek.biz
+86 186 5927 5869
Subscribe to Us
Cuando realice un pedido del brazo robótico para su proyecto de moldeo por inyección, lo ensamblaremos para que las piezas se depositen desde el lado del operador o desde el lado opuesto, según las necesidades de su proyecto. Sin embargo, en ocasiones será necesario cambiar la ubicación de la descarga de las piezas de la máquina de moldeo por inyección. En este caso, deberá invertir la instalación del brazo robótico. En este capítulo, utilizaremos un robot de inyección servo de 3 ejes con servomotor y controlador Panasonic como ejemplo para demostrar cómo realizar una instalación invertida de los brazos robóticos.
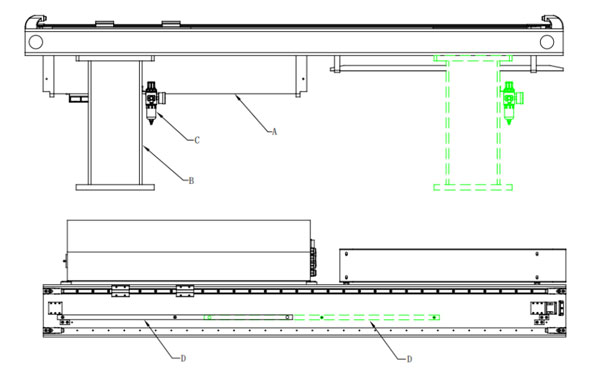
Base inversa
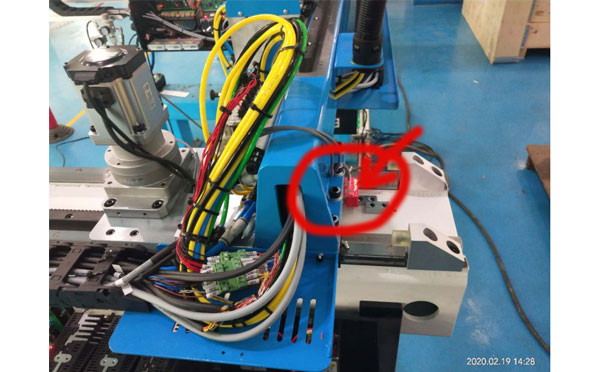
Sensor de reversa 1
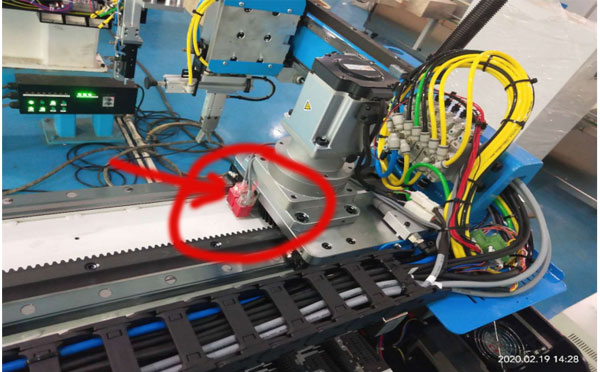
Sensor de marcha atrás 2
Descripción

Configuración de parámetros del Panasonic A6
El proceso de modificación:
Pulse la tecla "S" → luego pulse la tecla "M" (una vez), busque Pr0.00 → pulse la tecla "S" (una vez), si el parámetro mostrado es "1", modifíquelo a "0"; si es "0", cámbielo a "1" (pulse las teclas de flecha arriba/abajo para modificar los parámetros). Una vez finalizada la configuración, mantenga pulsada la tecla "S" durante 2 segundos → pulse la tecla "M" (una vez) → pulse la tecla "S" (una vez) → pulse la tecla "ARRIBA" (manténgala pulsada durante 7 segundos hasta que la pantalla muestre "-----") para guardar la configuración.
Repita el proceso anterior para configurar los parámetros de Pr0.12 y haga que el robot se apague y se reinicie una vez finalizada la configuración de todos los parámetros. El robot se iniciará con la nueva configuración.
ADVERTENCIA: Para la seguridad de sus instalaciones, realice cualquier modificación de los parámetros siguiendo las instrucciones de nuestro equipo de servicio en línea. Nuestro ingeniero de servicio le guiará paso a paso durante todo el proceso.
Email: sales06@switek.biz


Contacto SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right





