
sales06@switek.biz

+86 186 5927 5869

Subscribe to Us
sales06@switek.biz
+86 186 5927 5869
Subscribe to Us
La E/S aquí presente es para la señal de entrada/salida del brazo robótico, lo que permite a los operadores supervisar la comunicación entre el brazo robótico y la máquina de moldeo por inyección. Es una referencia para diagnosticar cualquier problema con el brazo robótico, ya sea por un cableado defectuoso o una programación incorrecta. La página de E/S, junto con el historial de alarmas, le ayudará a encontrar rápidamente una solución a cualquier fallo del brazo robótico.
Al hacer clic en el elemento de menú Monitor en la barra de menú principal, se abrirá la página del monitor, como se muestra a continuación:
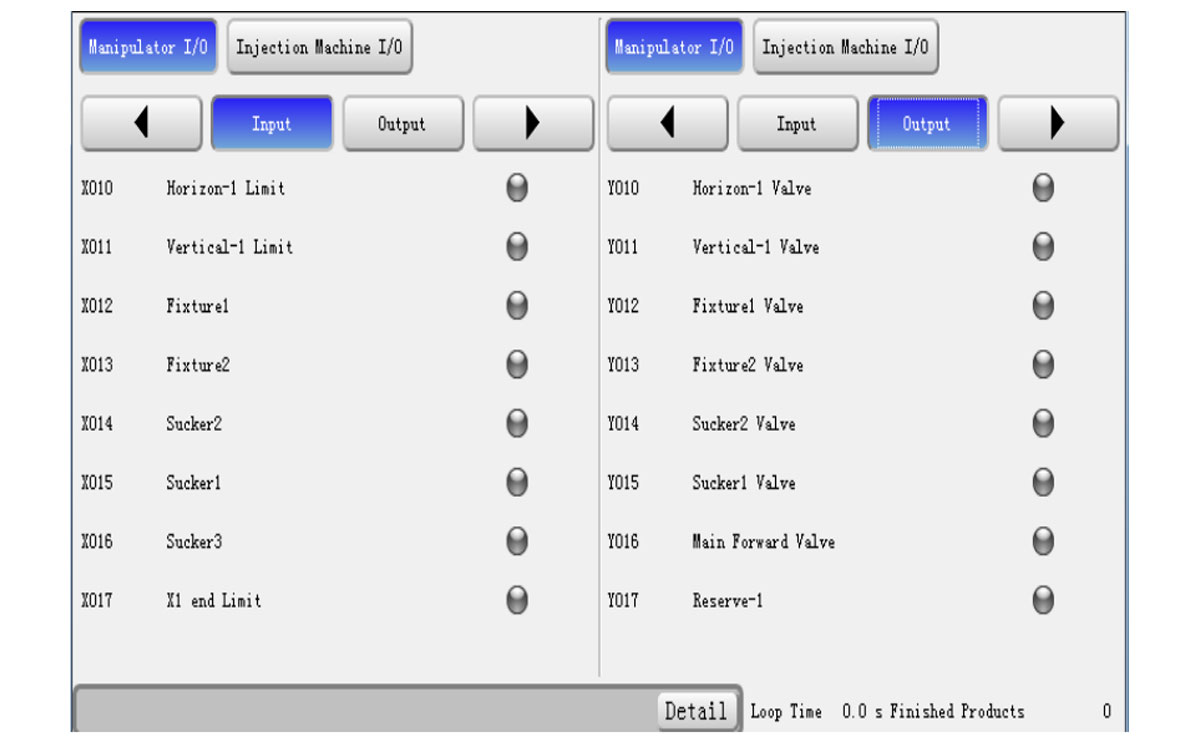
La ventana está dividida en dos partes independientes, izquierda y derecha. Puede visualizar las señales de entrada y salida simultáneamente. Haga clic en el botón E/S de la máquina de inyección para abrir el monitor de señales de E/S de la máquina de moldeo por inyección.
Al hacer clic en el elemento de menú Alarma en la barra de menú principal, se abrirá la página del historial de alarmas, como se muestra a continuación:
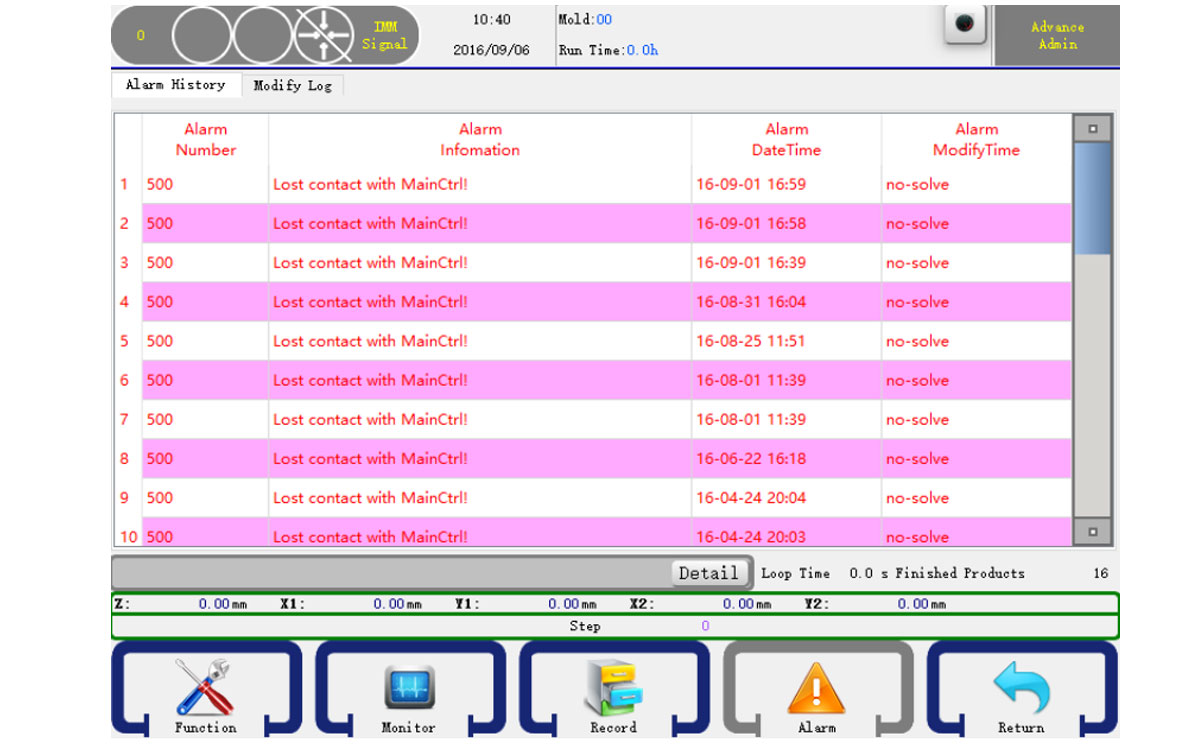
En esta página se mostrarán los últimos 50 registros de alarmas. Si la máquina tiene una alarma, haga clic en el botón "Detalle".
| Código | Información de alarma | Motivo de la alarma |
|---|---|---|
| 1190 | Main upper limit is not both on when Traverse out to in | Z axis traverse from inside security zone to outside security zone, main arm upper limit is off. |
| 1192 | La posición actual es inferior a la posición de seguridad permitida. | La posición actual es inferior a la posición de seguridad permitida. |
| 1193 | La posición actual es mayor que la posición de seguridad del permiso. | La posición actual es mayor que la posición de seguridad del permiso. |
| 1200 | Error en la señal de confirmación con el dispositivo 1 encendido | Error de comprobación de señal tras encender el dispositivo 1 |
| 1201 | Error en la señal de confirmación con el dispositivo 1 apagado | Error de comprobación de señal tras apagar el dispositivo 1 |
| 1202 | Error en la señal de confirmación con el dispositivo 2 encendido | Error de comprobación de señal tras encender el dispositivo 2 |
| 1203 | Error en la señal de confirmación con el dispositivo 2 apagado | Error de comprobación de señal tras apagar el dispositivo 2 |
| 1204 | Error en la señal de confirmación con el dispositivo 3 encendido | Error de comprobación de señal tras encender el dispositivo 3 |
| 1205 | Error en la señal de confirmación con el dispositivo 3 apagado | Error de comprobación de señal tras apagar el dispositivo 3 |
| 1206 | Error en la señal de confirmación con el dispositivo 4 encendido | Error de comprobación de señal tras encender el dispositivo 4 |
| 1207 | Error en la señal de confirmación con el dispositivo 4 apagado | Error de comprobación de señal tras apagar el dispositivo 4 |
| 1208 | Error en la señal de confirmación con Sucker1 activado | Error de comprobación de señal tras encender la ventosa 1 |
| 1209 | Error en la señal de confirmación con Sucker 1 apagado | Error de comprobación de señal tras apagar la ventosa 1 |
| 1210 | Error en la señal de confirmación con Sucker 2 activado | Error de comprobación de señal tras encender Sucker 2 |
| 1211 | Error en la señal de confirmación con Sucker 2 apagado | Error de comprobación de señal tras apagar la ventosa 2 |
| 1306 | Por favor, compruebe el punto de espera del accesorio 1. | El dispositivo 1 debe estar APAGADO en modo de espera. Por favor, verifique. |
| 1307 | Por favor, compruebe el punto de espera del accesorio 2. | El dispositivo 2 debe estar apagado en modo de espera. Por favor, verifique. |
| 1308 | Por favor, compruebe el punto de espera del dispositivo 3. | El dispositivo 3 debe estar apagado en modo de espera. Por favor, verifique. |
| 1309 | Por favor, compruebe el punto de espera del accesorio 4. | El dispositivo 4 debe estar apagado en modo de espera. Por favor, verifique. |
| 1310 | Por favor, compruebe el punto de espera Sucker 1 | El dispositivo Sucker 1 debe estar apagado en modo de espera. Por favor, verifique. |
| 1311 | Por favor, compruebe el punto de espera Sucker 2. | El dispositivo Sucker 2 debe estar apagado en modo de espera. Por favor, verifique. |
| 1400 | El eje Y no detecta el límite cuando sube | El brazo principal no está en la posición superior en modo automático, debes colocarlo en el origen manualmente. |
| 1403 | El eje Y2 no detecta el límite cuando aumenta | El brazo auxiliar no está en la posición superior en modo automático; debes colocarlo manualmente en su origen. |
Email: sales06@switek.biz


Contacto SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right





