
sales06@switek.biz

+86 186 5927 5869

Subscribe to Us
sales06@switek.biz
+86 186 5927 5869
Subscribe to Us
El funcionamiento de los brazos robóticos requiere la cooperación del sistema de control y la estructura mecánica, y la placa electrónica actúa como intermediario entre el sistema de control y la estructura mecánica de los brazos robóticos. En este capítulo, analizaremos la definición de los puertos de las placas instaladas en un brazo robótico.
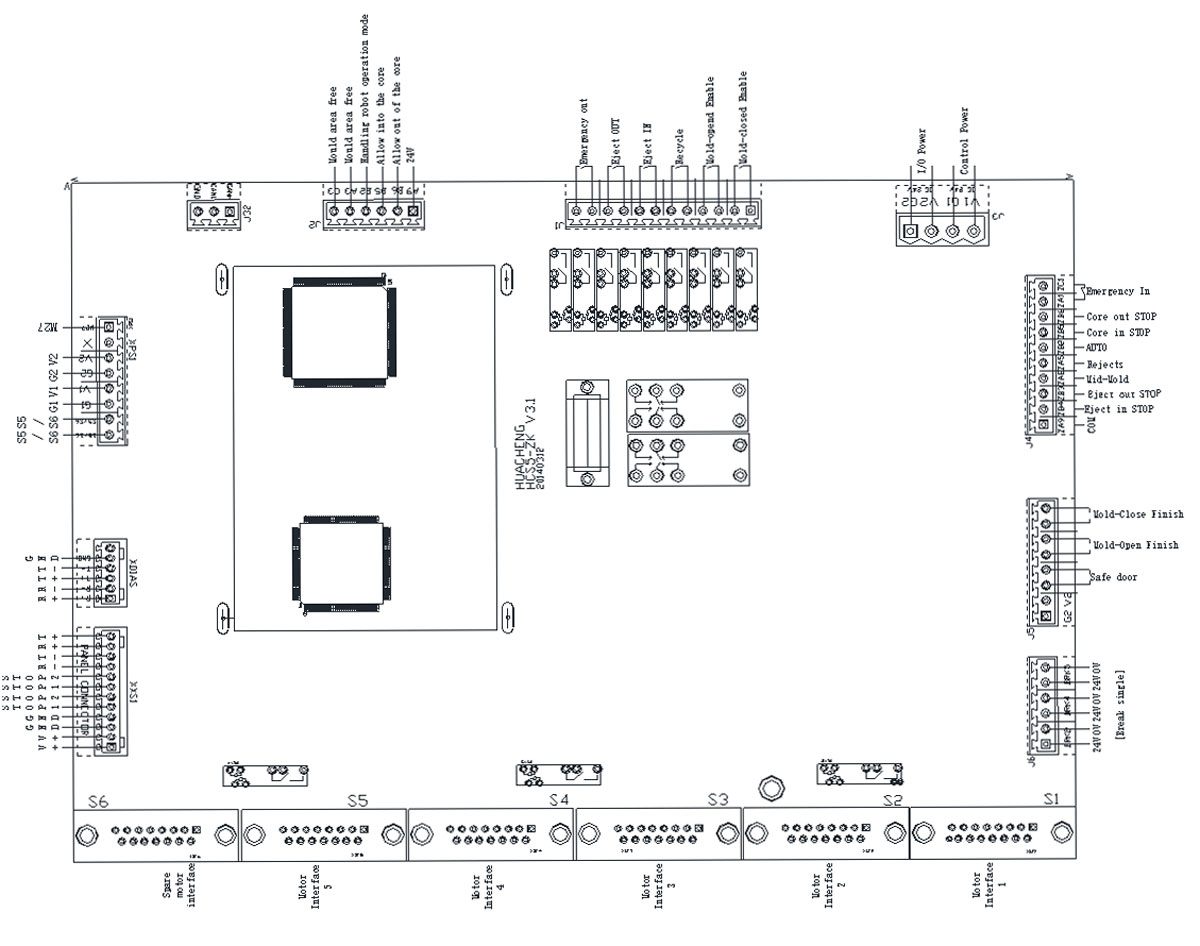
El dibujo superior muestra la definición de puertos de la placa principal de los brazos robóticos de inyección servo de 5 ejes SWITEK.
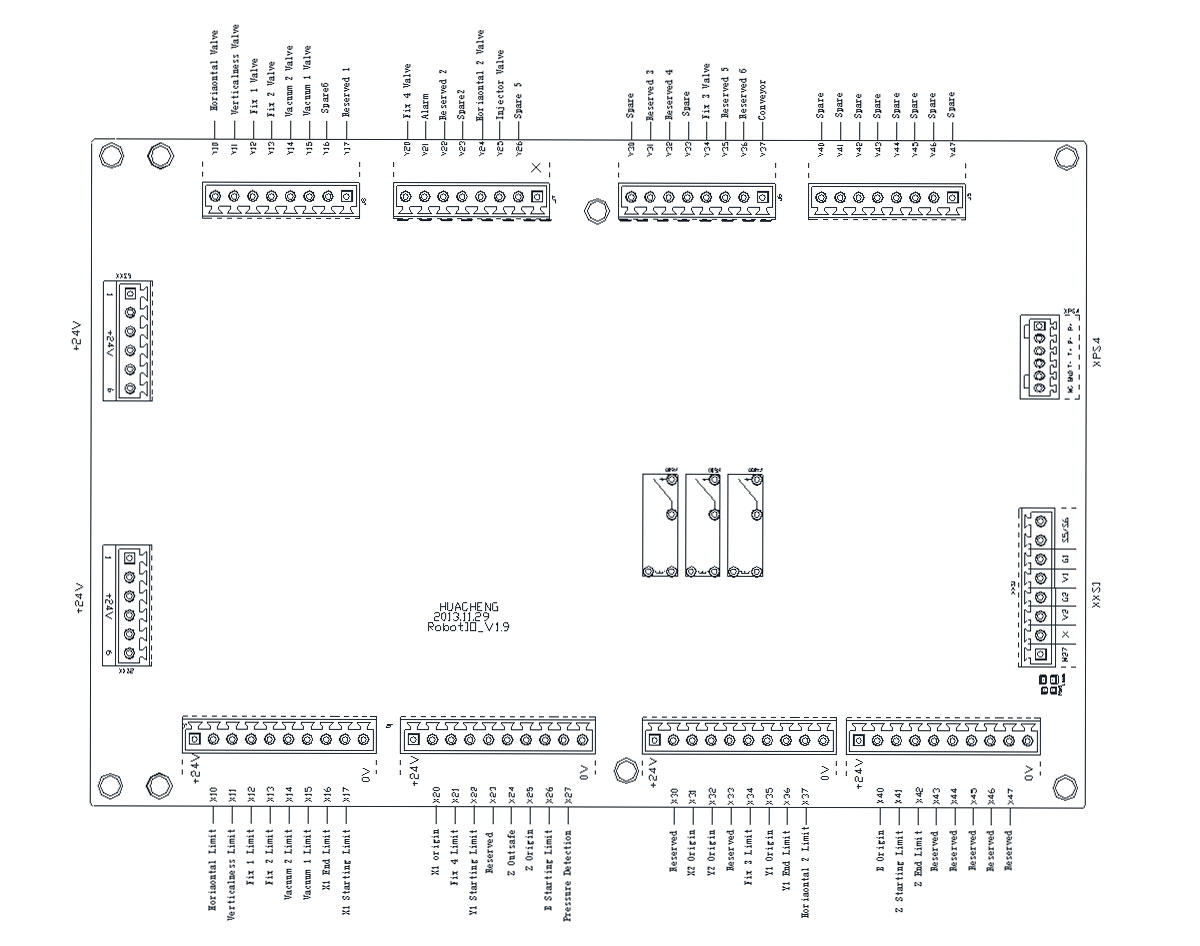
El dibujo superior muestra la definición de los puertos de la placa de E/S de los brazos robóticos de inyección servo de 5 ejes SWITEK.
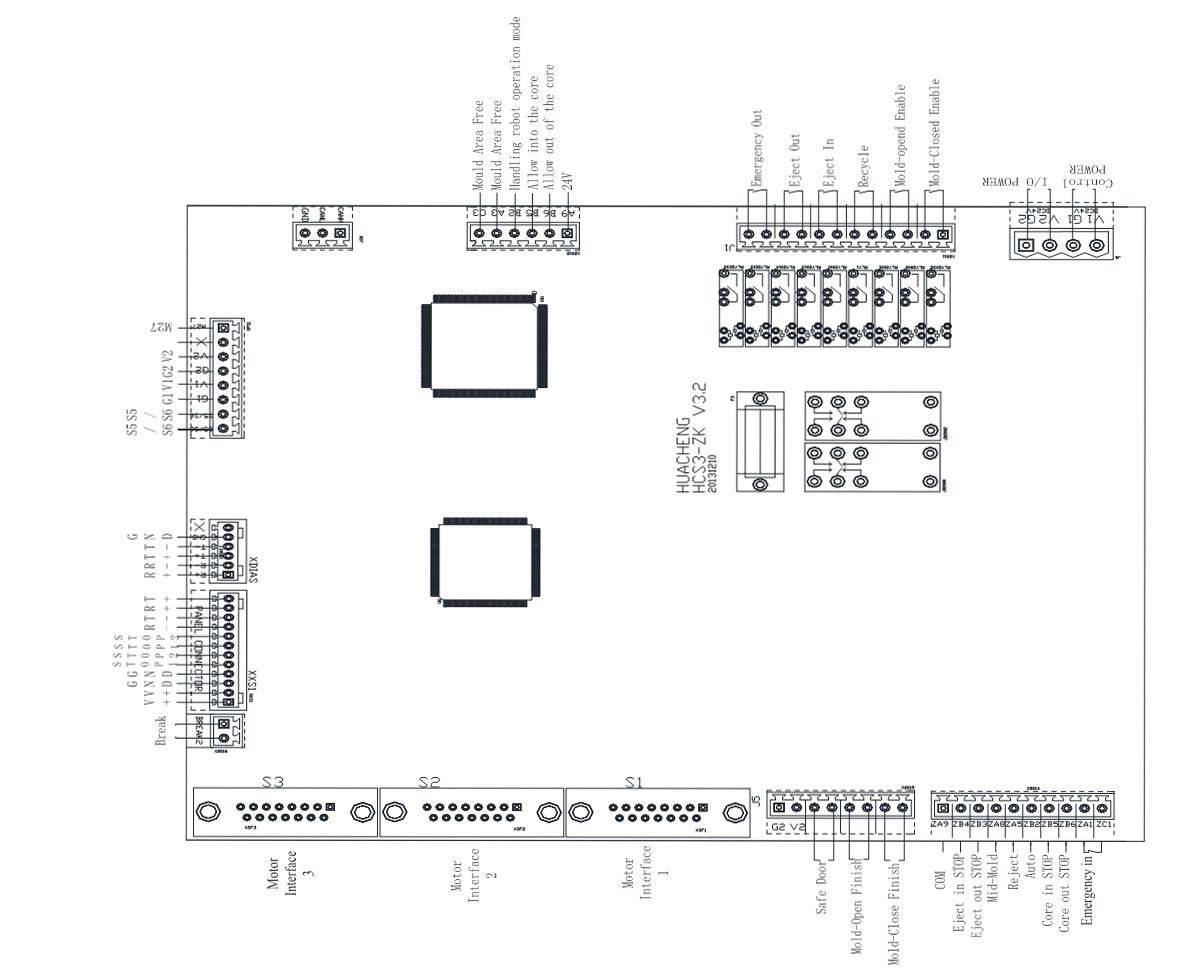
El dibujo superior muestra la definición de puertos de la placa principal de los brazos robóticos de inyección servo de 3 ejes SWITEK.
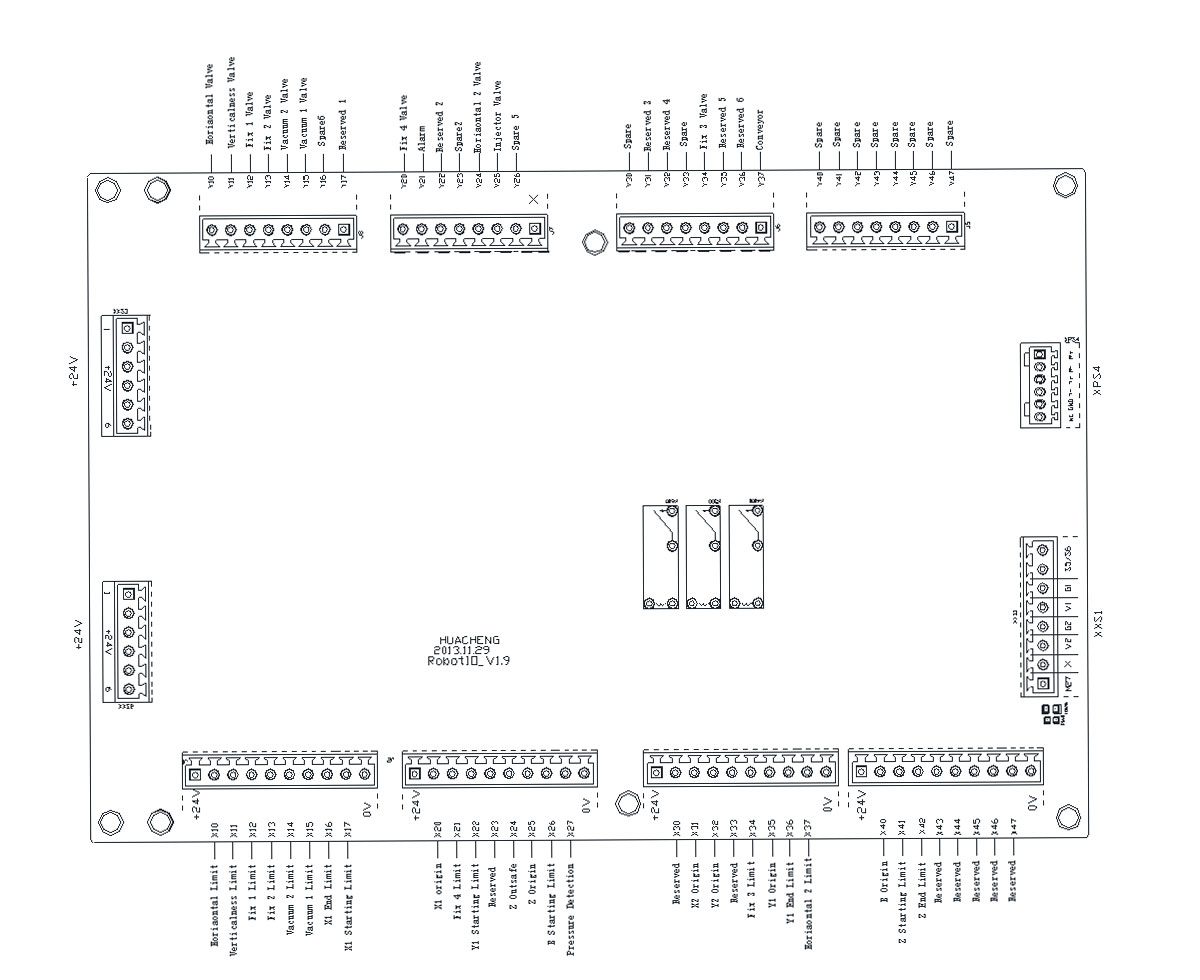
El dibujo superior muestra la definición de los puertos de la placa de E/S de los brazos robóticos de inyección servo de 3 ejes SWITEK.
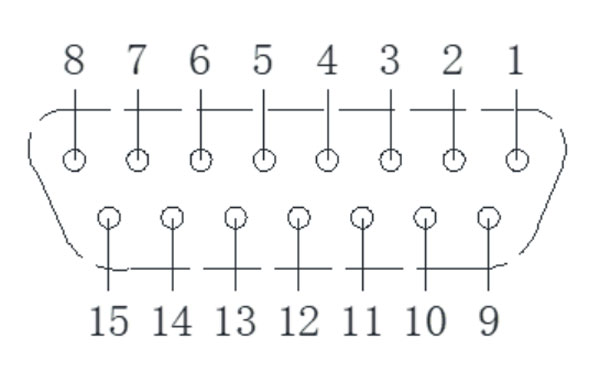
| Número de PIN | Definición de terminal | Número de PIN | Definición de terminal |
|---|---|---|---|
| 1 | +24V | 9 | 0V |
| 2 | OA+ | 10 | P+ |
| 3 | OA- | 11 | P- |
| 4 | OB+ | 12 | BRAKE |
| 5 | OB- | 13 | N+ |
| 6 | OZ+ | 14 | N- |
| 7 | OZ- | 15 | ALM |
| 8 | SON | 15 |
Email: sales06@switek.biz


Contacto SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right





