
sales06@switek.biz

+86 186 5927 5869

Subscribe to Us
sales06@switek.biz
+86 186 5927 5869
Subscribe to Us
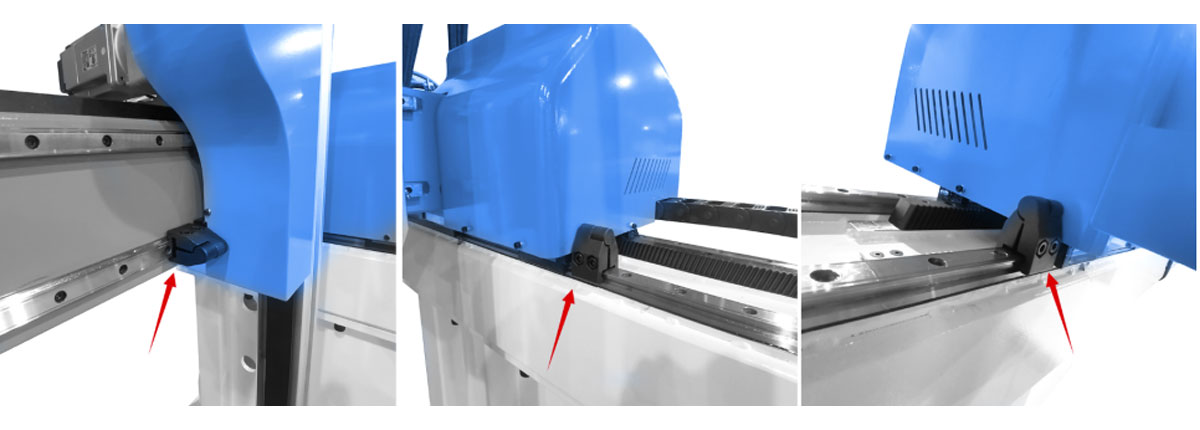
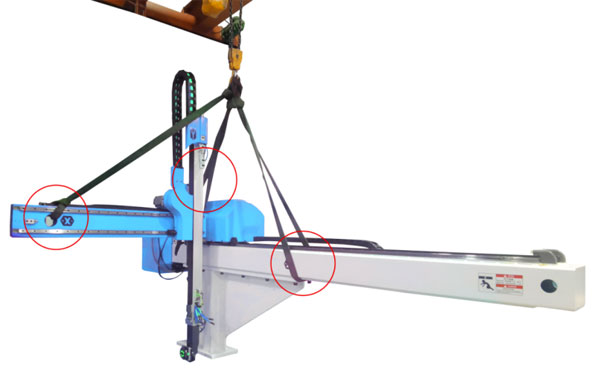
Los brazos robóticos para las máquinas de moldeo por inyección se instalan en la parte superior de la máquina. El instalador debe tener presentes las INSTRUCCIONES DE SEGURIDAD durante todo el proceso de instalación. En este capítulo, encontrará una guía detallada sobre cómo fijar el brazo robótico a la máquina de moldeo por inyección de forma segura, paso a paso.
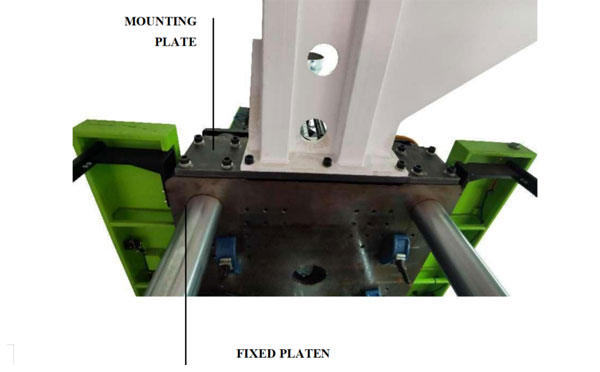
Primero verifique la placa base del robot o la placa de transferencia para ver si coincide con la placa de montaje de la máquina de moldeo por inyección.
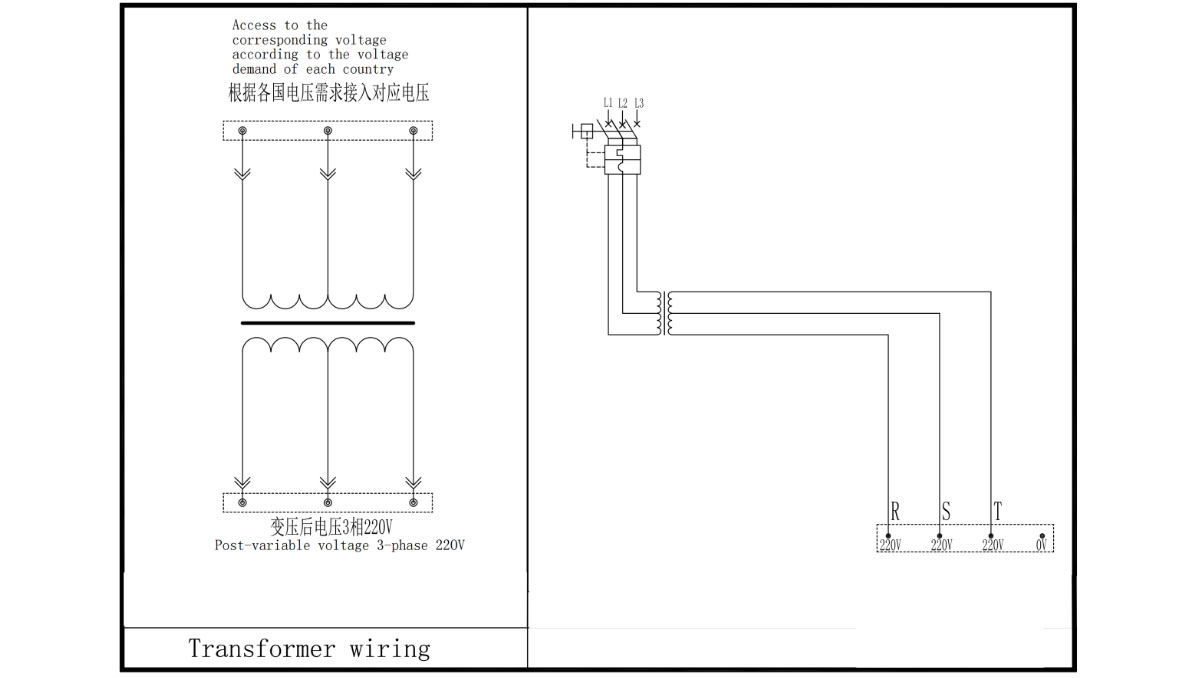
Conexión de la fuente de alimentación - Cableado de alimentación a través de un transformador
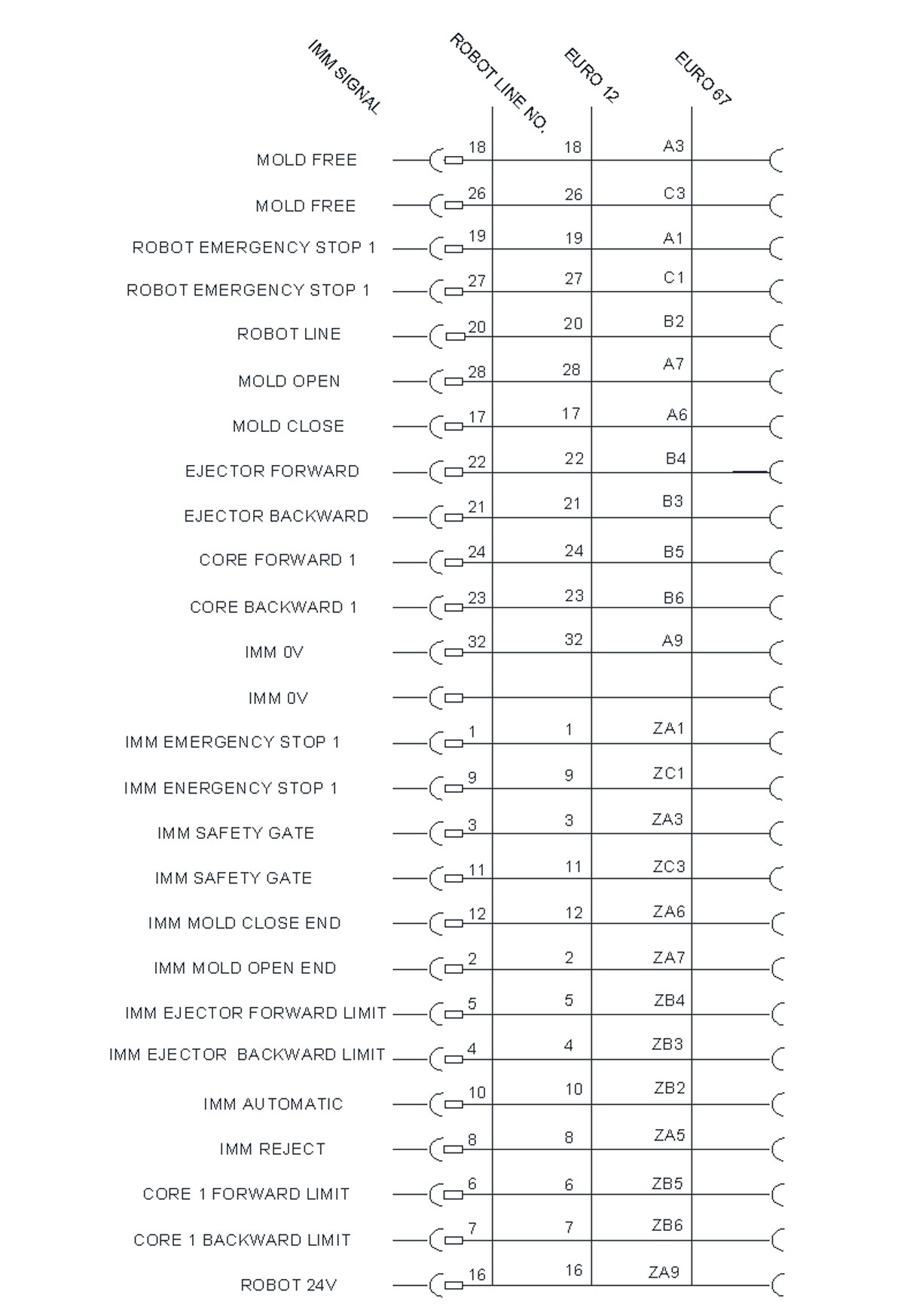
Comunicación con la máquina de moldeo por inyección - EU12/EU67/JIS
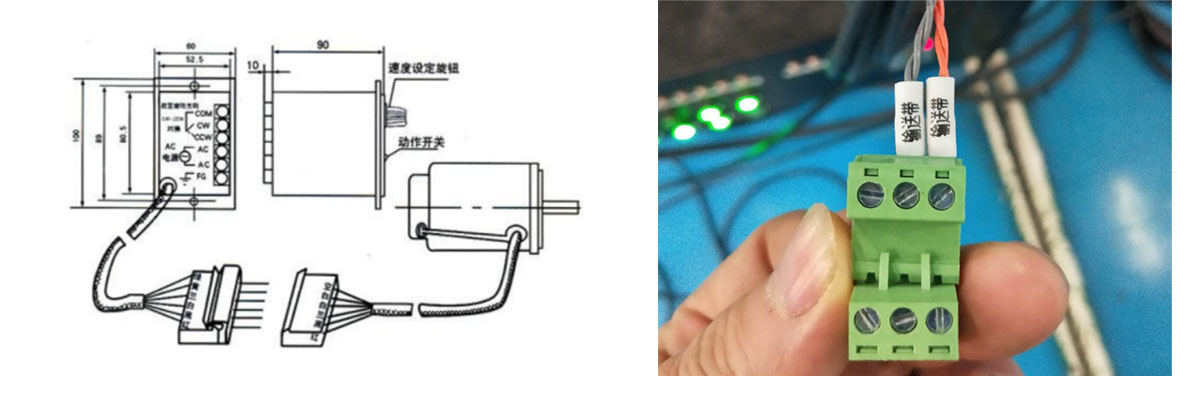
Los puntos COM y los puntos CW/CCW dentro de la caja de control de la cinta transportadora están conectados a su articulación en el robot.
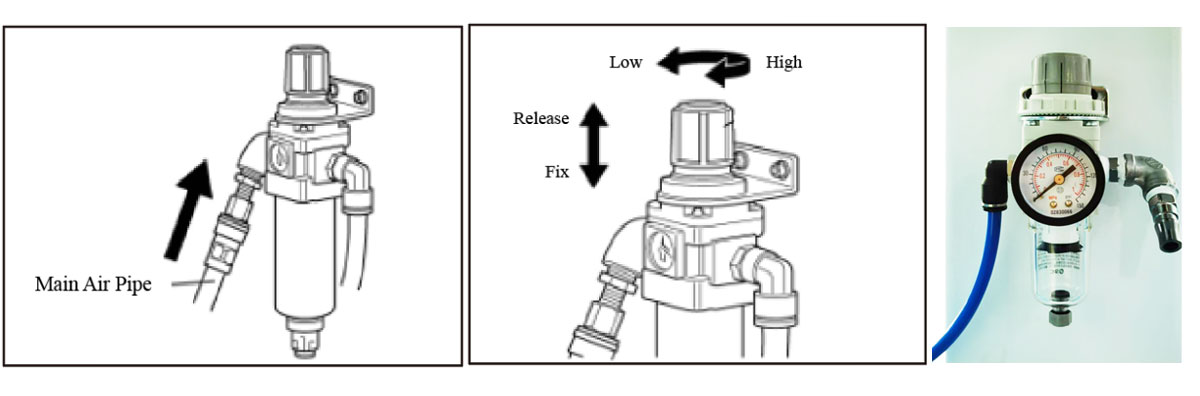
Conecte el tubo de aire principal preparado a la entrada "IN" de la válvula reductora de presión del filtro de aire.
NOTA: la presión de los dos manómetros no debe ser inferior a 0,5 mpa y la fuente de aire debe mantenerse seca.
Todas las tuberías y conductos de aire deben regularse y fijarse con cinta adhesiva y mantenerse alejados de áreas calientes y de alta temperatura.
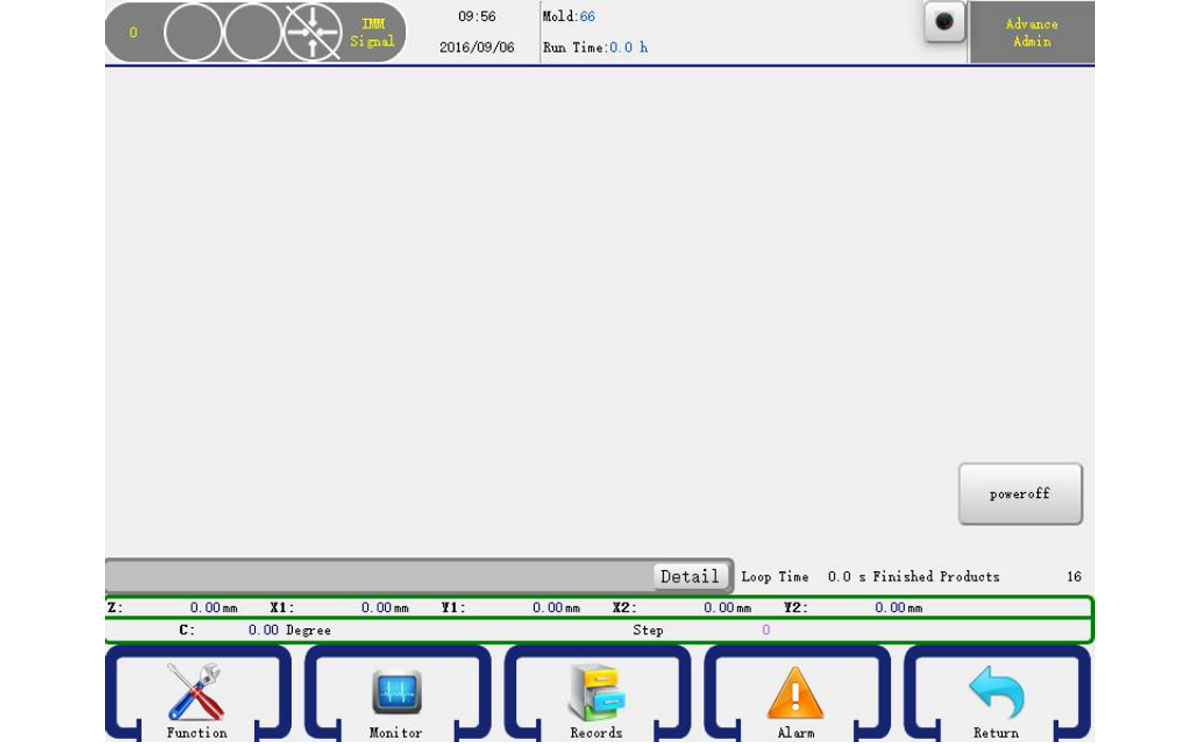

ÁREA 2: Para que la máquina de moldeo por inyección y el manipulador se conecten e intercambien señales en el área visual.
Email: sales06@switek.biz


Contacto SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right






