
sales06@switek.biz

+86 186 5927 5869

Subscribe to Us
sales06@switek.biz
+86 186 5927 5869
Subscribe to Us
Palabras clave: Robot IML; Operación de robot IML; Robótica de etiquetado en molde
Tras hacer clic en el botón Zona, accederemos a la página de configuración del eje, donde el operador establecerá la zona de trabajo del eje del robot IML. Aquí encontrará dos páginas: la de configuración del área, donde podrá configurar los parámetros de la zona de trabajo del eje del robot IML, y la de corrección del área, donde el operador podrá modificar los parámetros del eje del robot IML.
Configuración del área

| No. | Nombre | Función |
|---|---|---|
| (1) | Selección de puntos | Seleccione el extremo del área que desea configurar. |
| (2) | Memoria de posición actual | Haga clic para memorizar la posición actual del eje en el valor de configuración (3). |
| (3) | Establecer valor | Haga clic para modificar la configuración. |
| (4) | Posición | Se muestra la posición actual del eje. |
Corrección de Aera
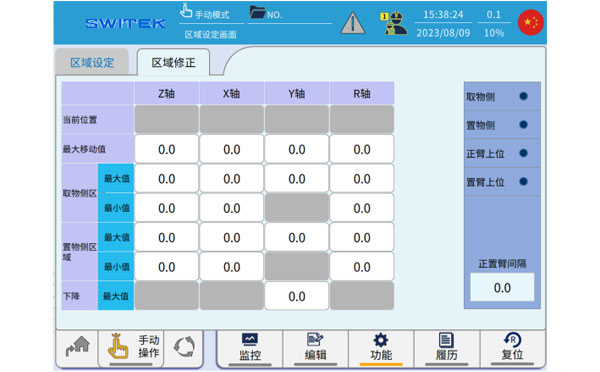
Los parámetros configurados en “Configuración de área” se pueden ver y modificar en “Corrección de área”.
Los parámetros del área establecida deben ser consistentes con la señal del sensor, etc., y el manipulador recibirá una alarma si desciende fuera del área establecida o si hay una tendencia a salirse del área establecida cuando el brazo está hacia abajo.
Email: sales06@switek.biz


Contacto SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right





