
sales06@switek.biz

+86 186 5927 5869

Subscribe to Us
sales06@switek.biz
+86 186 5927 5869
Subscribe to Us
Palabras clave: Robot IML; Operación de robot IML; Robótica de etiquetado en molde
La página "Configuración ACC" permite al operador del robot SWITEK IML configurar la velocidad de aceleración/desaceleración de cada eje del robot para que funcione de forma eficiente y estable.
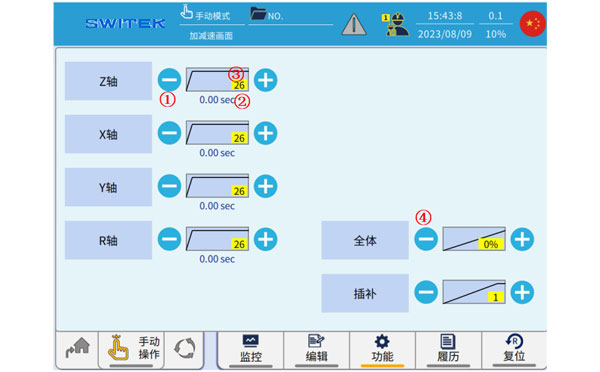
| No. | Nombre | Función |
|---|---|---|
| (1) | Engranajes "-""+" | Utilice los botones "-" y "+" para ajustar el engranaje de aceleración y desaceleración del eje del robot IML. |
| (2) | 0.00 sec | Se muestra el tiempo actual de aceleración y desaceleración del eje del robot IML. |
| (3) | 1~26 marchas | El tiempo de aceleración y desaceleración de la primera marcha es el máximo, determinado por el "tiempo máximo de aceleración y desaceleración" en los parámetros mecánicos. El tiempo de aceleración y desaceleración de la 26.ª marcha es el mínimo, determinado por el parámetro mecánico "tiempo mínimo de aceleración y desaceleración". |
| (4) | Toda aceleración y desaceleración | Haga clic para cambiar la configuración del tiempo de aceleración y desaceleración para todos los ejes. |
Email: sales06@switek.biz


Contacto SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right





