
sales06@switek.biz

+86 186 5927 5869

Subscribe to Us
sales06@switek.biz
+86 186 5927 5869
Subscribe to Us
Palabras clave:SISTEMA DE EMPAQUE DE PLACAS DE PETRI, SOLUCIONES DE MOLDEO POR INYECCIÓN DE PLACAS DE PETRI
Las páginas de ajuste de posición están diseñadas para que el operador del sistema de empaquetado de placas de Petri SWITEK indique desde dónde deben los brazos robóticos tomar la placa y dónde deben colocarse, apilarse o empaquetarse. En este capítulo, presentaremos el ajuste de la posición del eje del sistema de empaquetado de placas de Petri con entrada lateral SWITEK.
Ajuste de posición 1

| No. | Descripción |
|---|---|
| 1 | Ajuste de posición 1 (Pos Set 1) 400 |
| 2 | Ajuste de posición 2 (Pos Set 2) 401 |
| 3 | Ajuste de posición 3 (Pos Set 3) 402 |
| 4 | Ajuste de retardo 1 (Ajuste de retardo 1) |
| 5 | Posición de liberación de las piezas del brazo principal (brazo principal Rsl) 425 |
| 6 | Posición de espera del brazo principal (Main Arm Sby) 426 |
| 7 | Posición de recogida de placa de Petri del brazo principal (colocación del brazo principal) 427 |
| 8 | La posición donde el brazo principal permite iniciar un pre-activo (brazo principal avanzado) 428 |
| 9 | Posición de excepción del brazo principal (Excepción del brazo principal) 429 |
| 10 | Posición de habilitación de cierre de molde (Permitir cierre de molde seguro) 430 |
| 11 | Posición inicial de selección de placa de Petri (Mat Coll Init) 431 |
| 12 | Posición de recogida de placa de Petri (Mat Coll) 432 |
| 13 | Posición de finalización de la selección de la placa de Petri (Mat Coll Cmp) 433 |
| 14 | Posición segura para el acabado de la recolección de placas de Petri (Mat Coll Safe) 434 |
| 15 | Posición de recogida y colocación de la placa de Petri (Mat Rel) 435 |
| 16 | |
| 17 | Posición anormal de recogida/colocación de la placa de Petri (ubicación de la anomalía) 582 |
| 18 | Posición de seguridad de volteo (Flip Safe) 437 |
| 19 | Posición de transferencia de volteo (Flip Trans) 438 |
| 20 | Posición segura para voltear y colocar la placa de Petri (Flip Rel Safe) 439 |
| 21 | Posición de inicio segura con volteo (Flip Safe Start) 440 |
| 22 | Posición de giro de la placa de Petri (Flip Rel) 441 |
| 23 | Posición de finalización del volteo de la placa de Petri (Flip Cmpl) 442 |
| 24 | Posición segura para voltear la placa de Petri (Flip Cmpl Safe) 443 |
| 25 | Modo automático (Auto) |
| 26 | Modo manual (Manual) |
| 27 | Parámetros del sistema (Sys Params) |
| 28 | Ajustes de posición (Pos Set) |
| 29 | Interfaz de posición (Interfaz Pos) |
| 30 | Interfaz de alarma |
| 31 | Monitor de E/S (Monitor de E/S) |
Ajuste de posición 2

| No. | Descripción |
|---|---|
| 1 | Ajuste de posición (Pos Set 1) 400 |
| 2 | Ajuste de posición (Pos Set 2) 401 |
| 3 | Ajuste de posición (Pos Set 3) 402 |
| 4 | Ajuste de retardo (Ajuste de retardo 1) 403 |
| 5 | Posición inicial de volteo de placa de Petri (Flip Init) 405 |
| 6 | Voltear la placa de Petri en su lugar (voltear) 406 |
| 7 | Posición inicial de caída de placa de Petri (Blanqueo inicial) 583 |
| 8 | Posición de descarga de la placa de Petri (descarga del blanco) 584 |
| 9 | Posición inicial de apilamiento de placas de Petri (Inicialización de pila) 407 |
| 10 | Posición de caída de placas de Petri apiladas (caída de pila) 408 |
| 11 | Posición de parada del transportador de apilamiento de placas de Petri (transportador de parada) 585 |
| 12 | Posición inicial Arriba/Abajo (Unidad Arriba-Abajo) 409 |
| 13 | Posición de espera arriba/abajo (arriba-abajo) 410 |
| 14 | Posición de recolección de placa de Petri arriba y abajo 411 |
| 15 | Posición completa de recolección de placa de Petri arriba-abajo (complemento de recolección arriba-abajo) 412 |
| 16 | Posición de espera de liberación de placa de Petri arriba-abajo (Up-Dwn Rel Sby) 413 |
| 17 | Posición de liberación de la placa de Petri arriba-abajo (arriba-abajo Rel) 414 |
| 18 | Posición final de liberación de placa de Petri arriba-abajo (complemento de liberación arriba-abajo) 415 |
| 19 | Posición de recolección de placa de Petri horizontal (Horiz Coll1) 416 |
| 20 | Posición de recolección de placa de Petri horizontal (Horiz Coll 2) 417 |
| 21 | Posición de recolección de placa de Petri horizontal (Horiz Coll 3) 418 |
| 22 | Posición de recolección de placa de Petri horizontal (Horiz Coll 4) 419 |
| 23 | Posición de espera de placa de Petri horizontal (Horiz Standby) 586 |
| 24 | Posición de liberación de la placa de Petri horizontal (Horiz Rel) 420 |
| 25 | Modo automático (Auto) |
| 26 | Modo manual (Manual) |
| 27 | Parámetros del sistema (Sys Params) |
| 28 | Ajuste de posición (Pos Set) |
| 29 | Interfaz de posición (Interfaz Pos) |
| 30 | Interfaz de alarma |
| 31 | Monitor de E/S (Monitor de E/S) |
Ajuste de posición 3
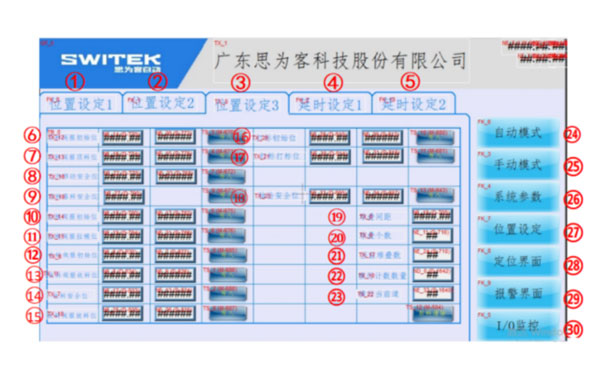
| No. | Descripción |
|---|---|
| 1 | Ajuste de posición 1 (Pos Set 1) 400 |
| 2 | Ajuste de posición 2 (Pos Set 2) 401 |
| 3 | Ajuste de posición 3 (Pos Set 3) 402 |
| 4 | Ajuste de retardo (Conjunto de retardo 1) 403 |
| 5 | Ajuste de retardo (Ajuste de retardo 2) 404 |
| 6 | Posición inicial del servomotor de estallido de placa de Petri (pos. inicial superior) 421 |
| 7 | Posición de defecación del servomotor de estallido de placa de Petri (posición superior) 422 |
| 8 | Posición de movimiento segura (Seguridad en movimiento) 587 |
| 9 | Petri Dish Cover Dropping Safety Position (Blank Safety Pos) 730 |
| 10 | Posición inicial del servo de tracción de manguito (Inicialización del molde de tracción) 423 |
| 11 | Posición inicial de extracción de la manga (molde de extracción) 424 |
| 12 | Posición inicial de recolección de placa de Petri (Mat Coll Init) 479 |
| 13 | Puesto de recogida de placas de Petri (estación de recogida) 576 |
| 14 | Posición segura para la recolección de placas de Petri (RecServo SP) 709 |
| 15 | Posición de liberación de las piezas del servo de recolección de placa de Petri (Mat Coll Rel) 480 |
| 16 | Posición inicial de impresión de marcas (Maring Init Pos) 731 |
| 17 | Marcar posición de impresión (Ajustar posición de margen) 732 |
| 18 | Puesto de seguridad para muestreo (Spot Check Safe) 746 |
| 19 | Espacio de apilamiento 481 |
| 20 | Números apilados (Num Stacks) 482 |
| 21 | Número apilado actualmente (cantidad de pilas) 694 |
| 22 | Número de conteo horizontal (Horiz Mat Ctr) 483 |
| 23 | Número de conteo de corriente horizontal (conteo de comportamiento desenfrenado) 748 |
| 24 | Modo automático (Auto) |
| 25 | Modo manual (Manual) |
| 26 | Parámetros del sistema (Sys Params) |
| 27 | Ajustes de posición (Pos Set) |
| 28 | Interfaz de posición (Interfaz Pos) |
| 29 | Alarm Interface |
| 30 | Monitor de E/S (Monitor de E/S) |
Email: sales06@switek.biz


Contacto SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right





