
sales06@switek.biz

+86 186 5927 5869

Subscript to Us
sales06@switek.biz
+86 186 5927 5869
Subscript to Us
Keywords:Panasonic A6 Servo Installation Instruction, Panasonic A6 Driver, Panasonic A6 Series Servo Motor Manual
The correct setup of the parameter and mode of the Panasonic A6 series of servo will ensure the proper working of the Panasonic A6 series of motor and the stability of your machineries and automation system.
| Parameter No. | Title | Range | Default | Unit | Turning on of power supply | Related Control Mode | Detail page | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Class | No. | A, B-frame | C-frame | D,E,F-frame | P | S | T | F | |||||
| 6 | 00 | Analog torque feed forward conversion gain | 0 to 100 | 0 | 0.1V/100%* | ○ | ○ | ○ | 4-68 | ||||
| 6 | 02 | Speed deviation excess setup | 0 to 20000 | 0 | r/min | ○ | |||||||
| 6 | 04 | JOG trial run command speed | 0 to 500 | 300 | r/min | ○ | ○ | ○ | ○ | ||||
| 6 | 05 | Position control 3rd gain effective time | 0 to 10000 | 0 | 0.1ms* | ○ | ○ | ||||||
| 6 | 06 | Position control 3rd gain scale factor | 50 to 1000 | 100 | % | ○ | ○ | ||||||
| 6 | 07 | Additional value to torque command | -100 to 100 | 0 | % | ○ | ○ | ○ | 4-69 | ||||
| 6 | 08 | Torque compensation value in positive direction | -100 to 100 | 0 | % | ○ | ○ | ||||||
| 6 | 09 | Torque compensation value in negative direction | -100 to 100 | 0 | % | ○ | ○ | ||||||
| 6 | 10 | Function expansion setup | -32768 to 32767 | 16 | - | ○ | ○ | ○ | ○ | ||||
| 6 | 11 | Current response setup | 10 to 100 | 100 | % | 4-70 | |||||||
| 6 | 13 | Second inertia ratio | 0 to 10000 | 250 | % | ○ | ○ | ○ | ○ | ||||
| 6 | 14 | Immediate stop time at the time of alarming | 0 to 1000 | 200 | 1 ms | ○ | ○ | ○ | ○ | ||||
| 6 | 15 | 2nd over-speed level setup | 0 to 20000 | 0 | r/min | ○ | ○ | ○ | ○ | ||||
| 6 | 16 | For manufacturer's use | - | 0 | - | ○ | ○ | ○ | ○ | ||||
| 6 | 17 | Front panel parameter writing selection | 0 to 1 | 0 | - | ○ | ○ | ○ | ○ | ○ | |||
| 6 | 18 | Power turn-on wait time | 0 to 100 | 0 | 0.1 s* | ○ | ○ | ○ | ○ | ○ | |||
| 6 | 19 | Encoder Z phase setup | 0 to 32767 | 0 | pulse | ○ | ○ | ○ | ○ | ○ | 4-71 | ||
| 6 | 20 | Z-phase setup of external scale | 0 to 400 | 0 | μs | ○ | ○ | ||||||
| 6 | 21 | Serial absolute external scale Z phase setup | 0 to 228 | 0 | pulse | ○ | ○ | ||||||
| 6 | 22 | A, B phase external scale pulse output method selection | 0 to 1 | 0 | — | ○ | ○ | 4-72 | |||||
| 6 | 23 | Load fluctuation correction gain | -100 to 100 | 0 | % | ○ | ○ | ||||||
| 6 | 24 | Load fluctuation correction filter | 10 to 2500 | 53 | 0.01 ms* | ○ | ○ | ||||||
| 6 | 27 | Alarm latch time selection | 0 to 10 | 5 | s | ○ | ○ | ○ | ○ | ○ | |||
| 6 | 28 | Special function selection | 0 to 1 | 0 | — | ○ | ○ | ||||||
| 6 | 30 | For manufacturer's use | — | 0 | — | 4-73 | |||||||
| 6 | 31 | Real time auto tuning estimation speed | 0 to 3 | 1 | — | ○ | ○ | ○ | ○ | ||||
| 6 | 32 | Real time auto tuning custom setup | -32768 to 32767 | 0 | — | ○ | ○ | ○ | ○ | 4-74 | |||
| 6 | 33 | For manufacturer's us | — | 1000 | — | 4-76 | |||||||
| 6 | 34 | Hybrid vibration suppression gain | 0 to 30000 | 0 | 0.1 /s* | ○ | |||||||
| 6 | 35 | Hybrid vibration suppression filter | 0 to 32000 | 10 | 0.01 ms* | ○ | |||||||
| 6 | 36 | Dynamic brake operation input | 0 to 1 | 0 | — | ○ | ○ | ○ | ○ | ○ | |||
| 6 | 37 | Oscillation detecting lelvel | 0 to 1000 | 0 | 0.1%* | ○ | ○ | ○ | ○ | ||||
| 6 | 38 | Alarm mask setup | -32768 to 32767 | 4 | — | ○ | ○ | ○ | ○ | ○ | 4-77 | ||
| 6 | 39 | For manufacturer's use | — | 0 | — | ||||||||
| 6 | 41 | 1st damping depth | 0 to 1000 | 0 | — | ||||||||
| 6 | 42 | Two-stage torque filter time constant | 0 to 2500 | 0 | 0.01 ms | ○ | ○ | ○ | ○ | ||||
| 6 | 43 | Two-stage torque filter damping term | 0 to 1000 | 0 | — | ○ | ○ | ○ | ○ | ||||
| 6 | 47 | Function expansion setting 2 | -32768 to 32767 | 1 | — | ○ | ○ | ○ | ○ | ○ | 4-78 | ||
| 6 | 48 | Adjustment filter | 0 to 2000 | A:11 B, C:12 | 17 | 0.1 ms | ○ | ○ | ○ | ||||
| 6 | 49 | Command response filter/adjustment filter damping term setting | 0 to 99 | 15 | — | ○ | ○ | ||||||
| 6 | 50 | Viscous friction compensation gain | 0 to 10000 | 0 | 0.1%/(10000 r/min) | ○ | ○ | ○ | 4-79 | ||||
| 6 | 51 | Immediate stop completion wait time | 0 to 10000 | 0 | ms | ○ | ○ | ○ | ○ | ||||
| 6 | 52 | For manufacturer's use | — | 0 | — | ||||||||
| 6 | 53 | For manufacturer's use | — | 0 | — | ||||||||
| 6 | 54 | For manufacturer's use | — | 0 | — | ||||||||
| 6 | 57 | Torque saturation error protection detection time | 0 to 5000 | 0 | ms | ○ | ○ | ○ | 4-80 | ||||
| 6 | 58 | Serial absolute external scale Z phase shift amount *1 | -2147483648 to 2147483647 | 0 | pulse | ○ | ○ | ○ | ○ | ○ | |||
| 6 | 60 | 2nd damping depth | 0 to 1000 | 0 | — | ○ | ○ | ||||||
| 6 | 61 | 1st responance frequency | 0 to 3000 | 0 | 0.1Hz | ○ | 4-81 | ||||||
| 6 | 62 | 1st resonance damping ratio | 0 to 1000 | 0 | — | ○ | |||||||
| 6 | 63 | 1st anti-responance frequency | 0 to 3000 | 0 | 0.1Hz | ○ | |||||||
| 6 | 64 | 1st anti-resonance damping ratio | 0 to 1000 | 0 | — | ○ | |||||||
| 6 | 65 | 1st response frequency | 0 to 3000 | 0 | 0.1Hz | ○ | |||||||
| 6 | 66 | 2nd resonance frequency | 0 to 3000 | 0 | 0.1Hz | ○ | |||||||
| 6 | 67 | 2nd resonance damping ratio | 0 to 1000 | 0 | — | ○ | |||||||
| 6 | 68 | 2nd anti-resonance frequency | 0 to 3000 | 0 | 0.1Hz | ○ | |||||||
| 6 | 69 | 2nd anti-responance damping ratio | 0 to 1000 | 0 | — | ○ | |||||||
| 6 | 70 | 2nd response frequency | 0 to 3000 | 0 | 0.1Hz | ○ | 4-82 | ||||||
| 6 | 71 | 3rd damping depth | 0 to 1000 | 0 | — | ○ | ○ | ||||||
| 6 | 72 | 4th damping depth | 0 to 1000 | 0 | — | ○ | ○ | ||||||
| 6 | 73 | Load estimation filter | 0 to 2500 | 0 | 0.01 ms | ○ | ○ | ○ | |||||
| 6 | 74 | Torque compensation frequency 1 | 0 to 5000 | 0 | 0.1Hz | ○ | ○ | ○ | |||||
| 6 | 75 | Torque compensation frequency 2 | 0 to 5000 | 0 | 0.1Hz | ○ | ○ | ○ | |||||
| 6 | 76 | Load estimation count | 0 to 8 | 0 | — | ○ | ○ | ○ | |||||
| 6 | 87 | For manufacturer's use | — | 0 | — | ||||||||
| 6 | 88 | Absolute multi-rotation data upper limit | 0 to 65534 | 0 | — | ○ | ○ | ○ | ○ | ○ | 4-83 | ||
| 6 | 97 | Function expansion setting 3 | -2147483648 to 2147483647 | 0 | — | ○ | ○ | ○ | ○ | ||||
| 6 | 98 | Function expansion setting 4 | -2147483648 to 2147483647 | 0 | — | ○ | ○ | ○ | ○ | ○ | |||
Caution → The symbol "*" attached to "Unit". indicates that the digits of setting unit will change if the parameter is set by using the setup support software PANATERM.
Note → Parameter describes of this page is P.4-6 to P.4-85.
HD100LDY -- HaiDa Hybrid Injection Molding Machine
| No. | Name | Value |
|---|---|---|
| 1 | Clamping Force | 1000 kN |
| 2 | Shot Weight | 55 g |
| 3 | Shot Speed | 200 mm/s |
| 4 | Screw Diameter | 26 mm |
| 5 | Opening Stroke | 330 mm |
| 6 | Space Between Tie Bars | 370 x 370 mm |
| 7 | Mold Thickness (Min) | 140 mm |
| 8 | Mold Thickness (Max) | 380 mm |
| 9 | Pumper Motor | 34 kW |
| 10 | Heating Capacity | 5 kW |
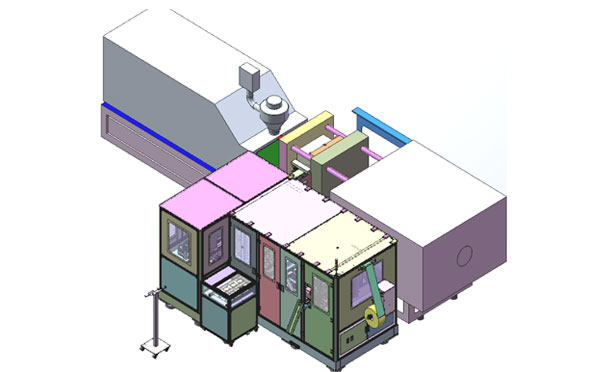
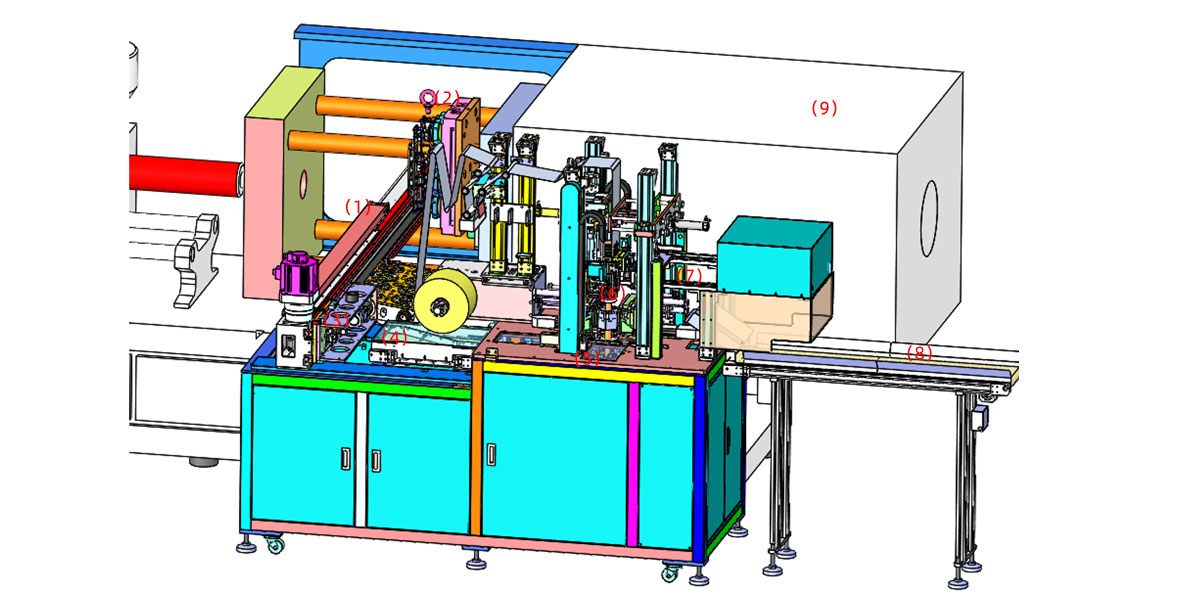
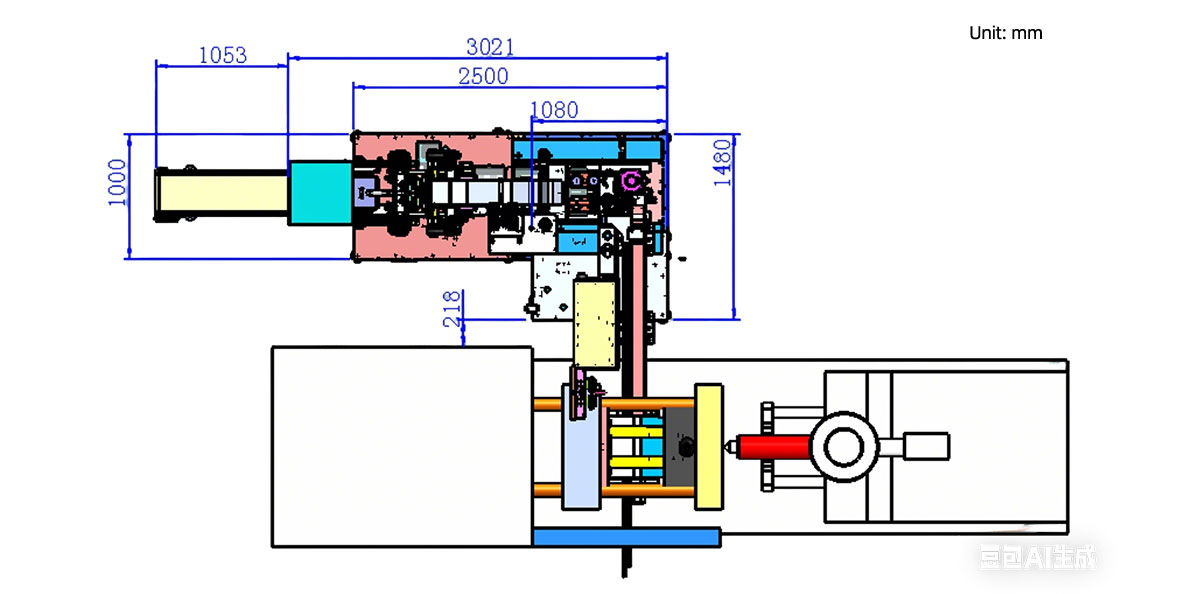
The SWITEK side entry petri dish packing system is a custom made automation system for the stable production of laboratory consumable plastic petri dish with the picking robot, the petri dish assembly, stacking, packing unit etc. integrated as auniformed system for the efficient and stable production of the petri dish. The system can be custome made for a petri dish mold layout design of 2+2, 4+4, 6+6, 8+8 etc.
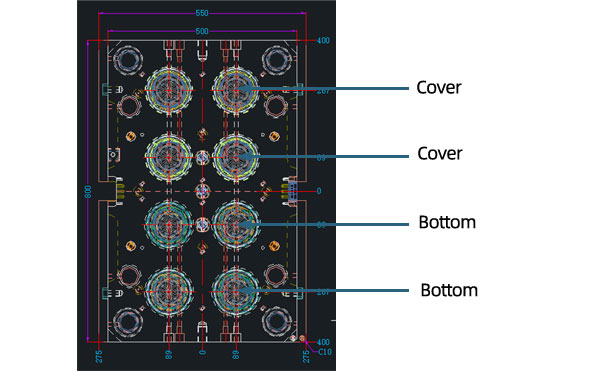
Mold Layout Deisgn
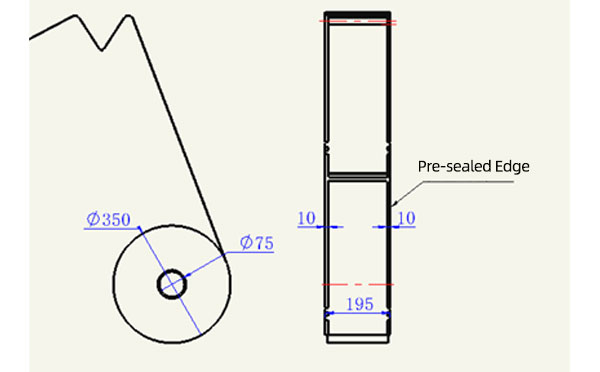
Sleeve Size for Package with Vacuum Request
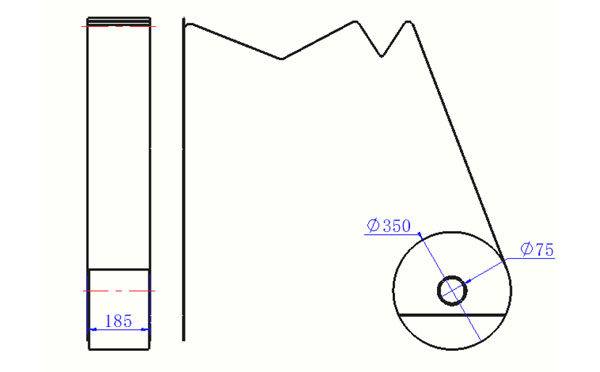
Sleeve Size for Package without Vacuum Request
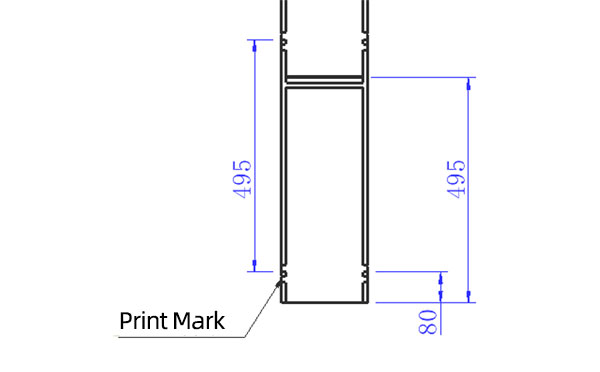
Sleeve (With Mark) Size for Package with Vacuum Request
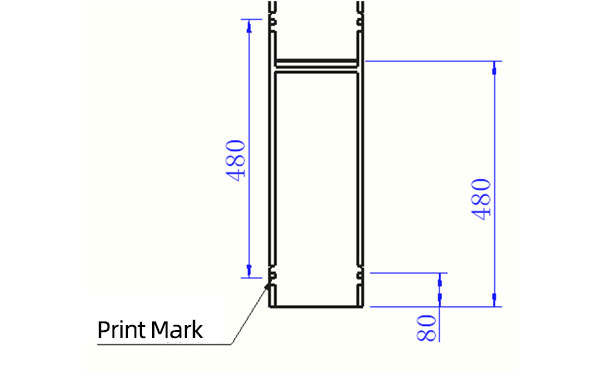
Sleeve (With Mark) Size for Package without Vacuum Request
I think you'll have an overall understanding about the SWITEK top/side entry petri dish packing system. If you still have any other question about it or need any help in your petri dish production project, please feel free to contact SWITEK laboratory consumable plastic parts injection molding solutions team for more information.
HuangYanZheng©Copy Right


