Instrucciones de instalación de los brazos robóticos SWITEK para máquinas de moldeo por inyección - Capítulo 7: Configuraciones de funciones
Abstracto
La programación de un brazo robótico para una máquina de moldeo por inyección no solo implica configurar la posición del eje, habilitar o deshabilitar los cilindros y otras piezas de fin de brazo, etc., sino que también incluye la configuración de las señales para la comunicación del robot con la máquina de moldeo por inyección, la configuración del producto, la configuración de la pila, la configuración de la máquina, la configuración del sistema y la configuración de los puntos de seguridad. En este capítulo, explicamos paso a paso cómo se configuran estos parámetros de los brazos robóticos.
En el estado de parada, haga clic en el elemento del menú de funciones en la barra de menú principal para acceder a la página de configuración de funciones. Como se muestra a continuación:
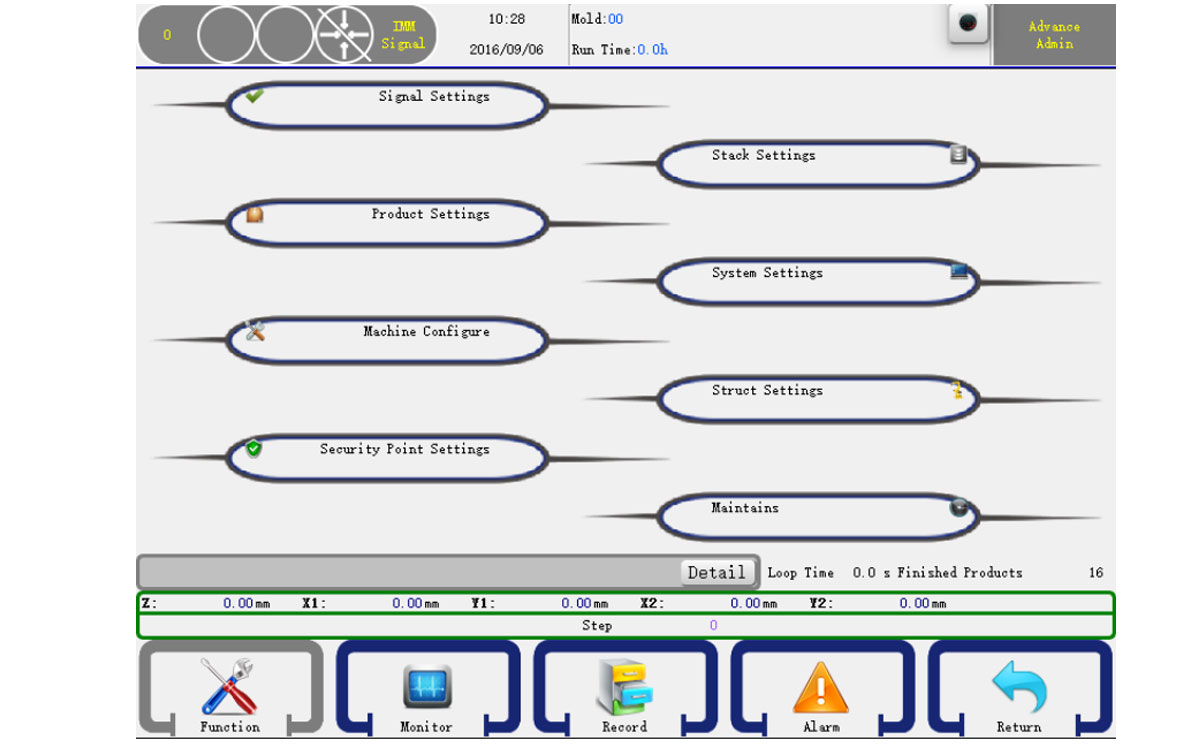
Puede seleccionar un grupo de funciones en esta página. Al hacer clic en el elemento, se abrirá la página de configuración detallada correspondiente. La configuración de la estructura solo puede ser configurada por el Administrador avanzado.
7.1 Configuración de la señal
Haga clic en el elemento Configuración de señal para ir a la página de configuración de señal, como se muestra a continuación:

- Detectar luminarias 1-4: Positivo: Verificar si la señal de entrada de la luminaria está activada. Inverso: Verificar si la señal de entrada de la luminaria está desactivada.
- Subdispositivo
Positivo: Verificar si la señal de entrada del dispositivo está activada.
Inverso: Verificar si la señal de entrada del dispositivo está desactivada. - Detectar posición:
Horizontal:La postura debe ser horizontal al ejecutar la acción transversal.
Vertical:La postura debe ser vertical al ejecutar la acción transversal.
Sin límite:Sin límite: No detecta. - Detectar origen:
Horizontal:El brazo robótico debe estar en posición horizontal al ejecutar la acción transversal.
Vertical:El brazo robótico debe estar en posición vertical al ejecutar la acción transversal.
Sin límite:Sin límite: No detecta. - Posición U/D:
Horizontal:El brazo robótico debe estar en posición horizontal al ejecutar la acción transversal.
Vertical:El brazo robótico debe estar en posición vertical al ejecutar la acción transversal.
Sin límite:Sin límite: No detecta. - Hor Standby:
Molde con bloqueo de límite: El molde se cierra solo después de que el brazo robótico se mueve hacia arriba a la posición de espera.
Molde sin bloqueo de límite: El molde se cierra en cuanto el brazo robótico comienza a moverse hacia arriba. - Cerrar molde:
Uso: El robot entrará en el molde para la recogida de piezas solo después de que se reciba la señal de Molde abierto tras la señal de Molde cerrado. De lo contrario, se activará la alarma de Molde no bloqueado.
No uso: El robot no detectará la señal de Molde cerrado, pero entrará en el molde para la recogida de piezas tan pronto como reciba la señal de Molde abierto. - Detectar puerta de seguridad:
Uso: Alarma cuando la puerta de seguridad está abierta mientras el robot está en modo automático, independientemente de la acción.
No uso: Alarma cuando la puerta de seguridad está abierta al ejecutar la acción de bajar el brazo. - Detectar presión:
Uso: El robot comprobará la presión del aire comprimido. Si es inferior al valor estándar, emitirá una alarma.
Sin uso: No comprobará la presión. - Detectar Molde Intermedio:
Uso:El robot comprobará la señal del molde intermedio. Si no hay señal cuando el brazo robótico está dentro del molde, se activará una alarma.
Sin uso: No se comprueba la señal del molde intermedio. - Bloqueo del enlace de expulsión: Uso: La señal de activación del eyector se desactivará una vez finalizada la apertura del molde, por lo que se debe insertar la señal "Activación del eyector" en el programa. Sin uso: La señal de activación del eyector estará normalmente activada.
- Ejecución automática
Uso: El robot comprobará la señal Auto de la máquina de moldeo por inyección. Si no se detecta en el modo automático, se activará una alarma. Sin uso: El robot no comprobará la señal Auto de la máquina de moldeo por inyección.
7.2 Configuración del producto
Haga clic en el botón Configuración del producto para ir a la página de configuración del producto, como se muestra a continuación:
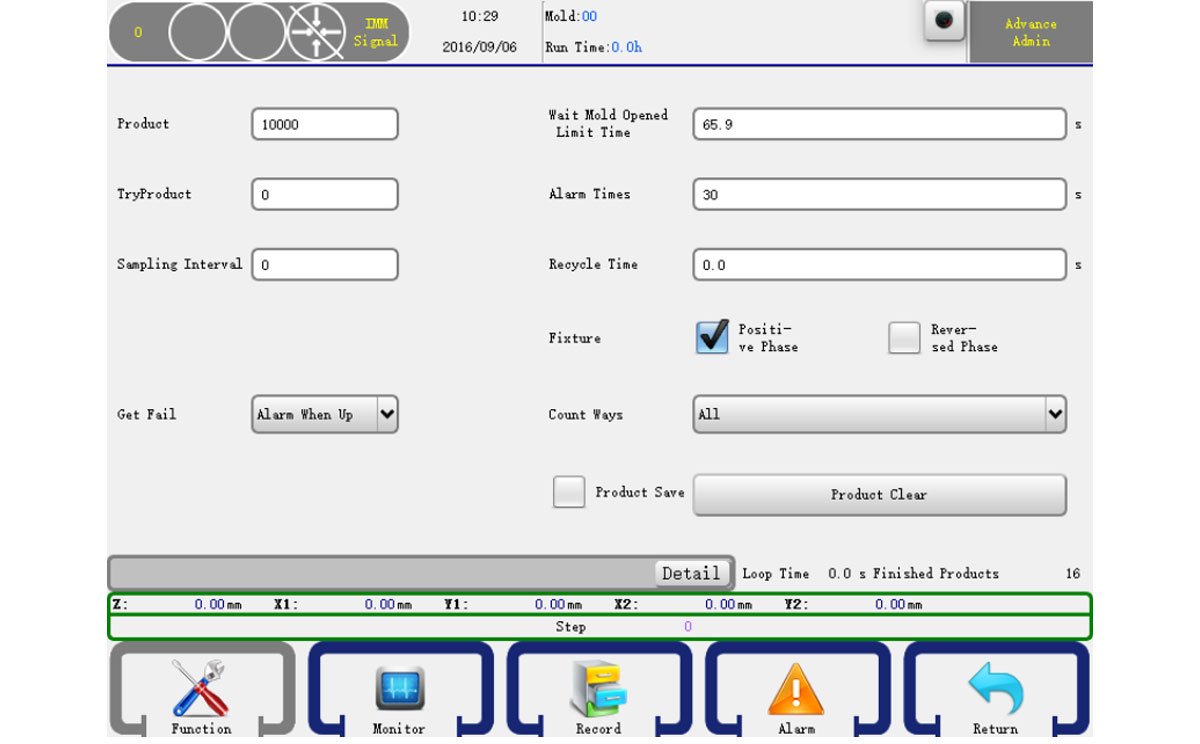
- Producto: Al configurar el conteo de productos, cuando se supera el número establecido, se activa la alarma.
- Producción de prueba: El número de productos para la producción de prueba.
- Intervalo de muestreo: El intervalo en el que se tomará una muestra para verificar la calidad.
- Obtener Falla:
Activar Alarma: Activar y activar la alarma cuando se detecta la señal de falla.
Alarma: Alarma inmediata tras la falla en la selección de piezas. - Tiempo limitado de espera de molde abierto: El tiempo para esperar la señal de Molde abierto, el robot emitirá una alarma si el tiempo de espera es mayor que el configurado.
- Tiempos de alarma:El momento de la alarma continua.
- Borrar producto:Borra el recuento de producto terminado.
- Tiempo de reciclaje: Al seleccionar la función "Molde bloqueado", se establece el tiempo transcurrido entre la señal de "Molde cerrado" y la señal de "Molde habilitado" desactivada.
7.3 Configuración de la máquina
Haga clic en el botón Configurar máquina para ir a la página de configuración de la máquina, como se muestra a continuación:
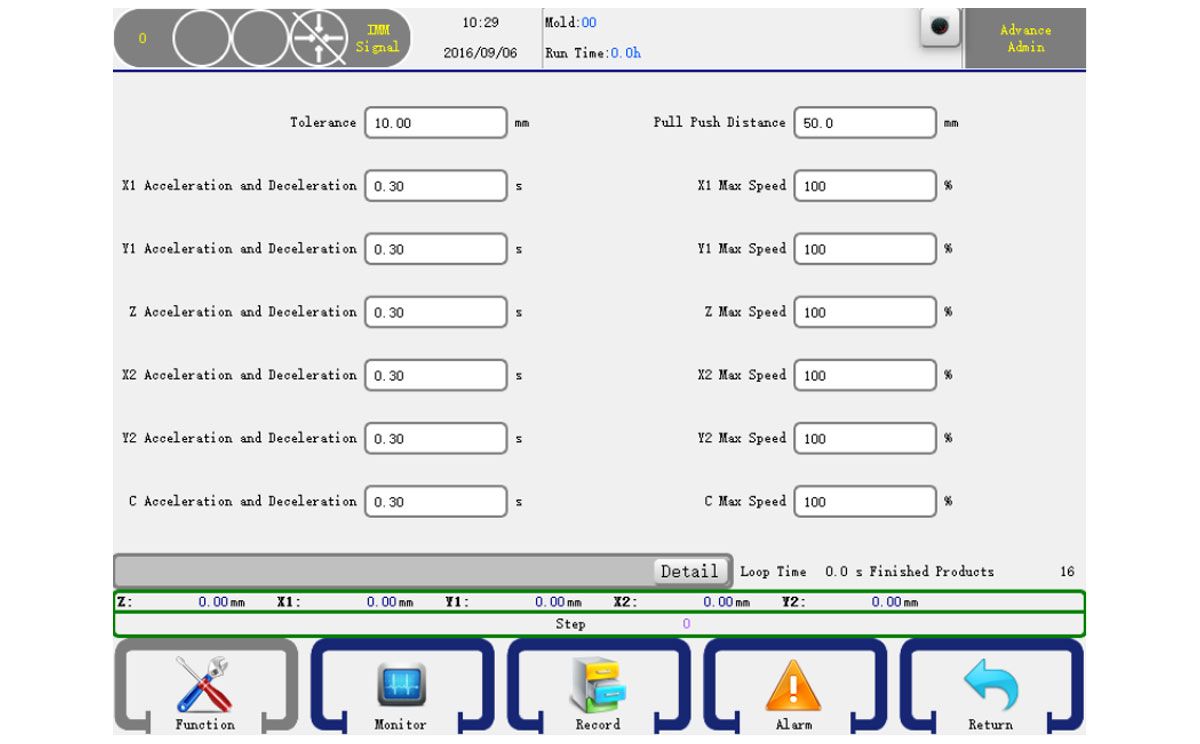
Tolerancia: La tolerancia entre el pulso enviado y el pulso de retroalimentación del servo. Zona de seguridad: Una zona de seguridad entre los brazos y los subbrazos. Aceleración y desaceleración X, Y, Z: El tiempo de aceleración y desaceleración del eje del servo. Velocidad máxima X, Y, Z: La velocidad máxima del eje del servo.
7.4 Configuración de puntos de seguridad
Haga clic en el botón Configuración del punto de seguridad para ir a la página de configuración del punto de seguridad, como se muestra a continuación:
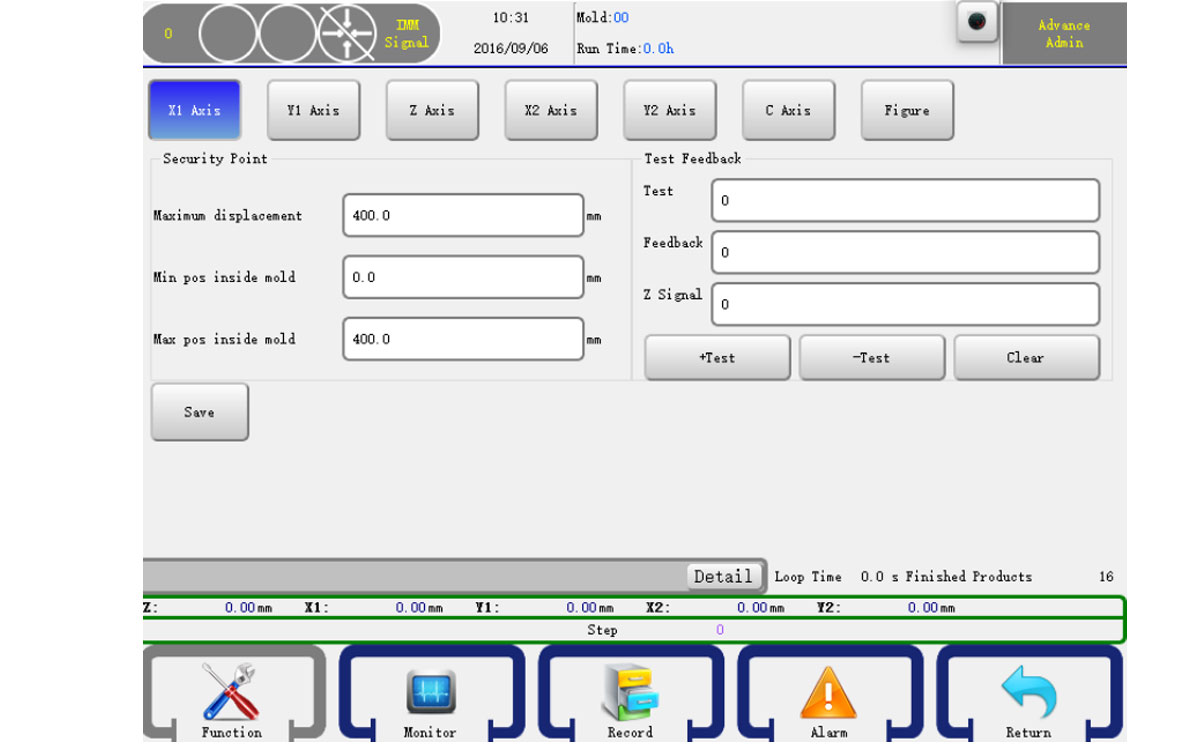
- Pulse la X del menú superior para seleccionar el eje que desea ver. Máx.: El movimiento máximo del eje. Máximo interior: La posición máxima que el eje puede mover en la máquina. Mínimo interior: La posición mínima que el eje puede mover en la máquina. +Prueba: Prueba el pulso positivo del servo. -Prueba: Prueba el pulso de reserva del servo. Borrar: Borra los datos de la prueba. Una vez hecho esto, haga clic en el botón "Establecer i" para confirmar.
- Pulse el elemento de menú Y1 en la parte superior para seleccionar el eje que desea ver.
Posición máxima en espera:Establezca la posición de espera de los puntos máximos del eje Y1.
Distancia de regreso al origen:Posición de Y1 antes de la operación OPR.
Pulse el elemento de menú Y1 en la parte superior para seleccionar el eje que desea ver. - Pulse la opción Z del menú superior para seleccionar el eje que desea ver.
Zona de seguridad interior:Establezca un número para la zona de seguridad dentro de la máquina.
Zona de seguridad exterior:Un número para la distancia de seguridad fuera de la máquina. - Presione el elemento de menú C en la parte superior para seleccionar el eje que desea ver.
Rango seguro transversal:Un ángulo de seguridad al moverse transversalmente. - Pulse el elemento de menú "Estructura" en la parte superior. Como se muestra a continuación:
Incremento mínimo dentro del eje X: Posición mínima de X al elevar el brazo en la máquina.
Incremento máximo dentro del eje X: Posición máxima de X al elevar el brazo.
Incremento mínimo fuera del eje Y: Posición mínima de Y al elevar el brazo fuera de la máquina.
Incremento máximo fuera del eje Y: Posición máxima de Y al elevar el brazo.
Atención:Puede modificar la posición mínima y máxima de X en el campo de parámetros del eje X de la página de parámetros mecánicos.
7.5 Configuración de la pila
Haga clic en el elemento Configuración de pila para ir a la página de configuración de pila, como se muestra a continuación:
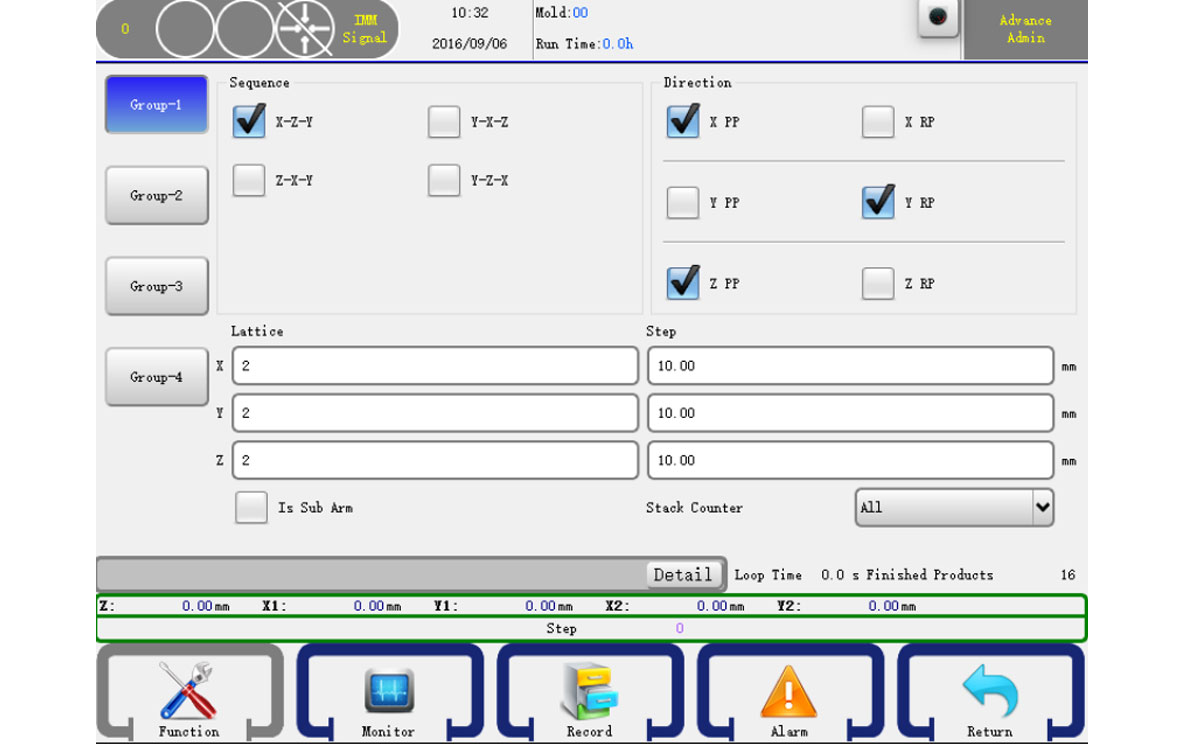
Nuestro sistema cuenta con cuatro configuraciones de apilamiento de grupos.
Secuencia: Seleccione la secuencia de apilamiento
X RP: Si está marcada, el robot apilará en reversa en el eje X.
Y RP: Si está marcada, el robot apilará en reversa en el eje Y.
Z RP: Si está marcada, el robot apilará en reversa en el eje Z.
7.6 Configuración del sistema
7.6.1 Configuración
Haga clic en el elemento Configuración del sistema para ir a la página de configuración del sistema, como se muestra a continuación:
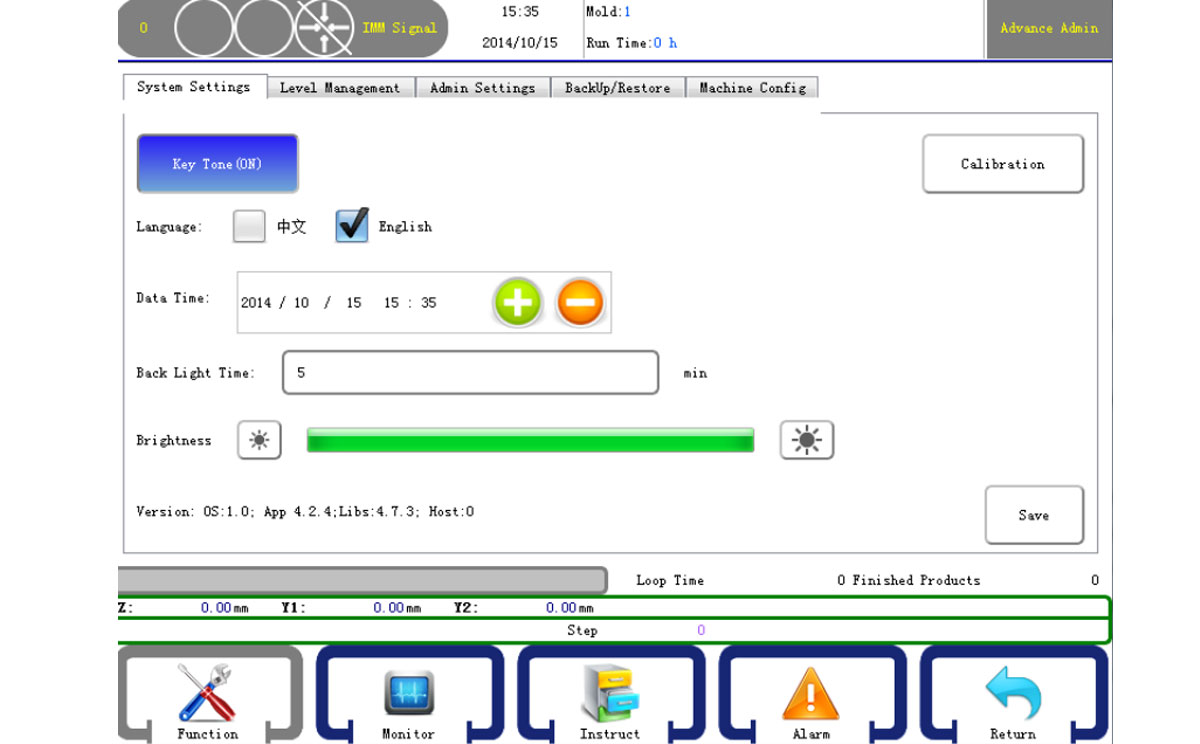
Tono de tecla: Al presionarlo, el teclado emitirá un pitido si está activado. Idioma: Selecciona el idioma de la interfaz. Fecha y hora: Configura la fecha y hora actual. Tiempo de retroiluminación: Si no se realiza ninguna acción al configurar la hora, la retroiluminación se apagará. Versión: La versión del sistema. Haz clic en Guardar para confirmar la configuración del sistema.
7.6.2 Gestión de niveles
Haga clic en el elemento Administración de niveles para ir a la página de configuración del sistema, como se muestra a continuación:
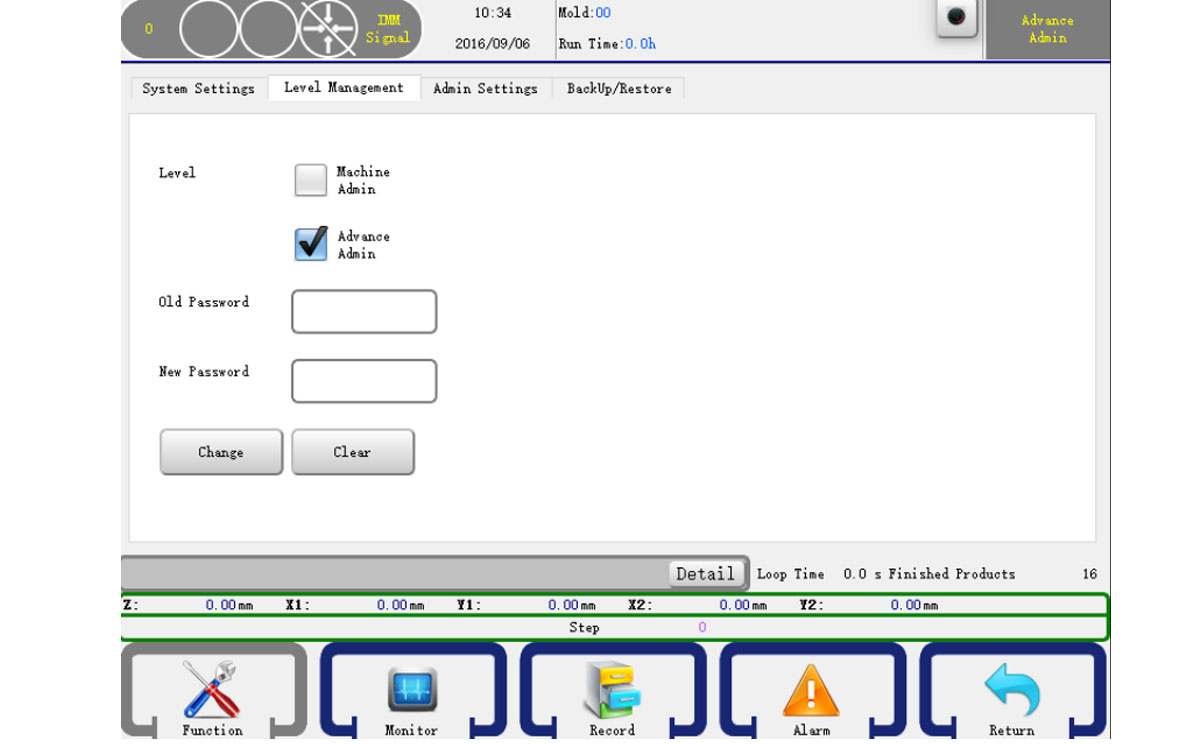
La gestión de niveles puede cambiar la información básica, mientras que el administrador puede modificar cualquier parámetro. Ingrese la contraseña anterior, introduzca la nueva y confirme para poder cambiarla.
7.6.3 Copia de seguridad/Restauración
Haga clic en el elemento Copia de seguridad/Restaurar para ir a la página de configuración del sistema, como se muestra a continuación:
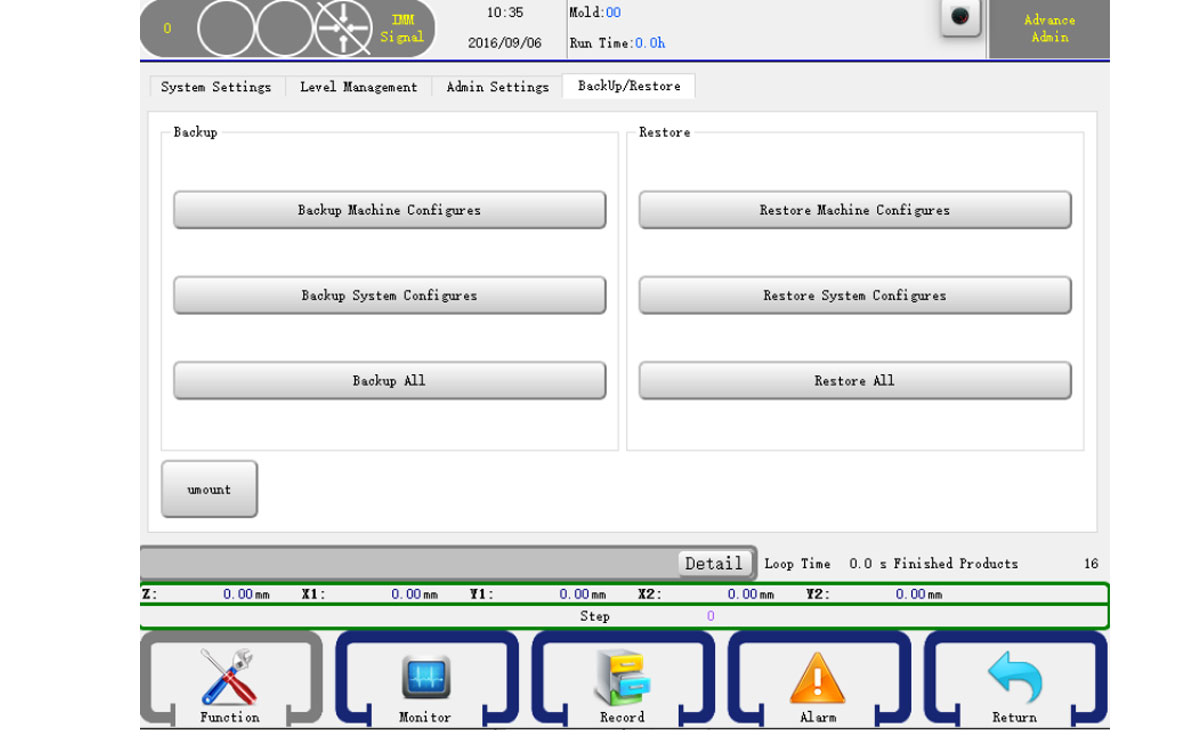
Puede utilizar USB para realizar una copia de seguridad o restaurar "Parámetros de la máquina", "Parámetros del sistema" y "Parámetros del molde" o seleccionar todos para realizar una copia de seguridad o restaurarlos.
7.7 Configuración de la estructura
Haga clic en el elemento Configuración de estructura para ir a la página de configuración de estructura, como se muestra a continuación:
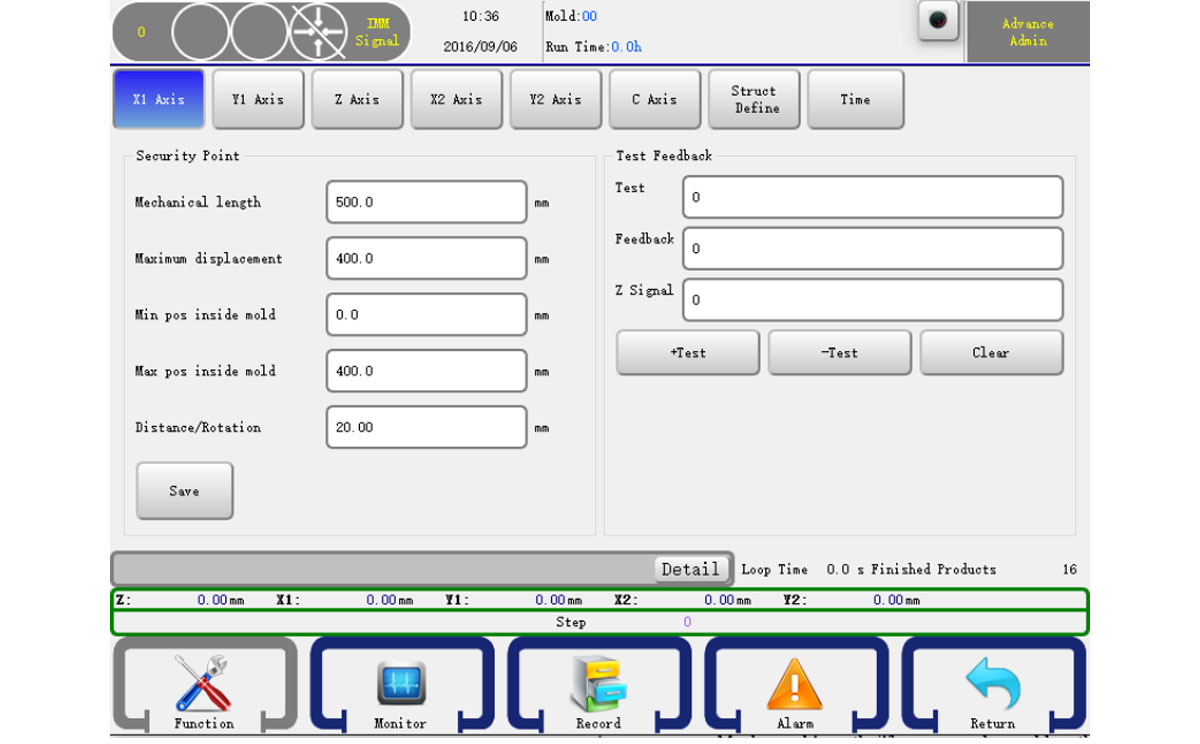
Longitud mecánica: Longitud mecánica del eje. Distancia/Rotación: Distancia de una rotación del servo. También puede configurar otros parámetros como 5.4. Pulse el botón Guardar para confirmar el cambio. ADVERTENCIA: La definición de la estructura puede causar daños a la máquina y lesiones personales. Consulte al fabricante.
7.8 Mantiene
Haga clic en el elemento Mantenimiento para ir a la página de mantenimiento, como se muestra a continuación:
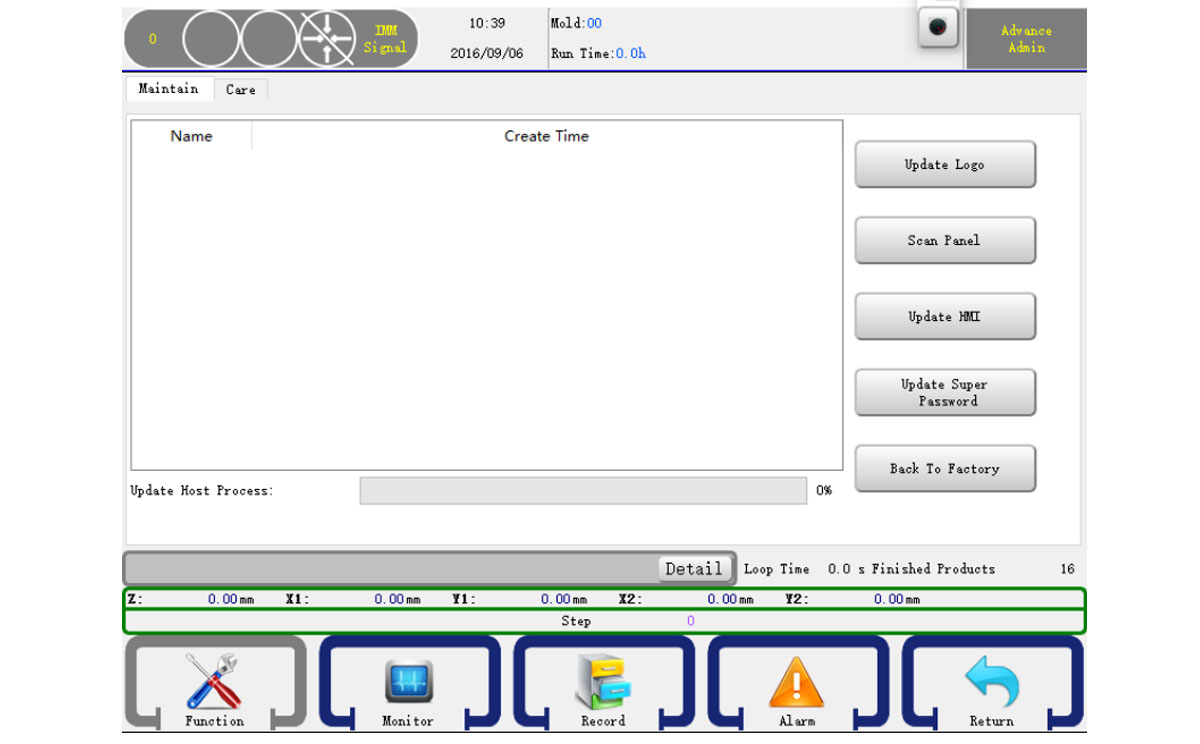
Puede actualizar el sistema del panel de control mediante una memoria USB. Guarde el paquete de actualización del sistema en una memoria USB. Haga clic en el botón "Actualizar" y espere un momento. La página mostrará la versión del sistema si se puede verificar el paquete de actualización del sistema desde la memoria USB. Si no se puede, simplemente presione el botón "Actualizar" de nuevo o use otra memoria USB. Si se verifica el paquete de actualización del sistema, simplemente haga clic en el botón "Actualizar" para iniciar la actualización. Al finalizar, aparecerá un mensaje y el sistema se reiniciará. Después, podrá desconectar la memoria USB.







