
sales06@switek.biz

+86 186 5927 5869

Subscript to Us
sales06@switek.biz
+86 186 5927 5869
Subscript to Us
The programming of a robotic arm for injection molding machine is not only a setting of the axis position, enable/disable the cylinders and other EOAT parts etc., but also include the signal settings to have the robot communicating with the injection molding machine, the product settings, the stack setting, machine sconfigure, system settings, security point settings etc. In this chapter we're discussing how are these parameters of the robotic arms configured step by step.
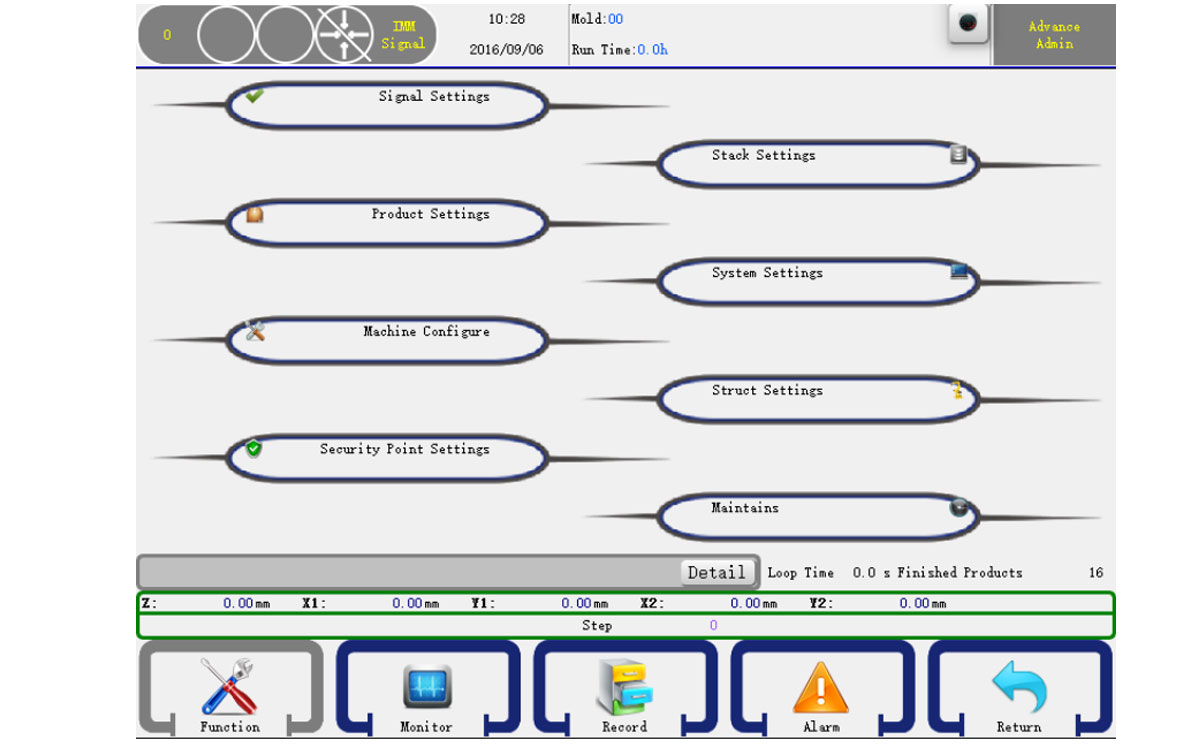
In the stop status and then click the function menu item on the main menu bar to go into function configures page. As shown below:
Click the Signal Settings item to go into the signal setting page, as shown below:

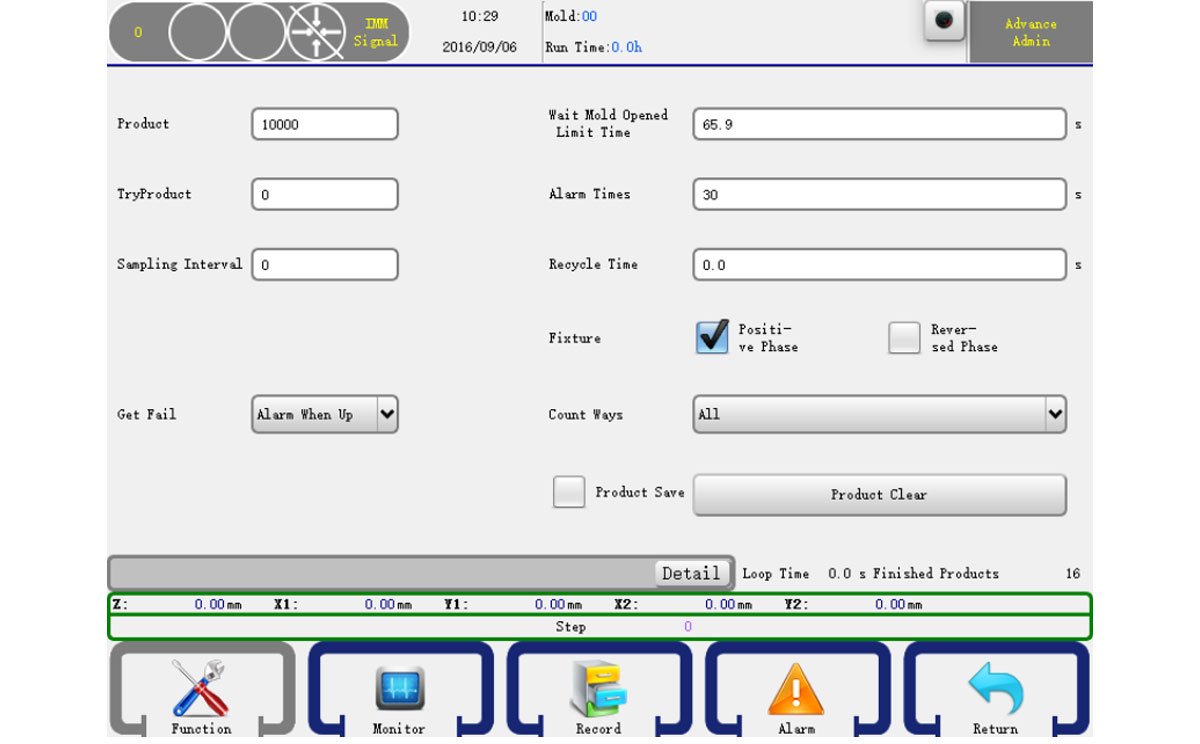
Click the Product Settings button to go into the product setting page, as shown below:
Click the Machine Configure button to go into the machine configure page, as shown below:
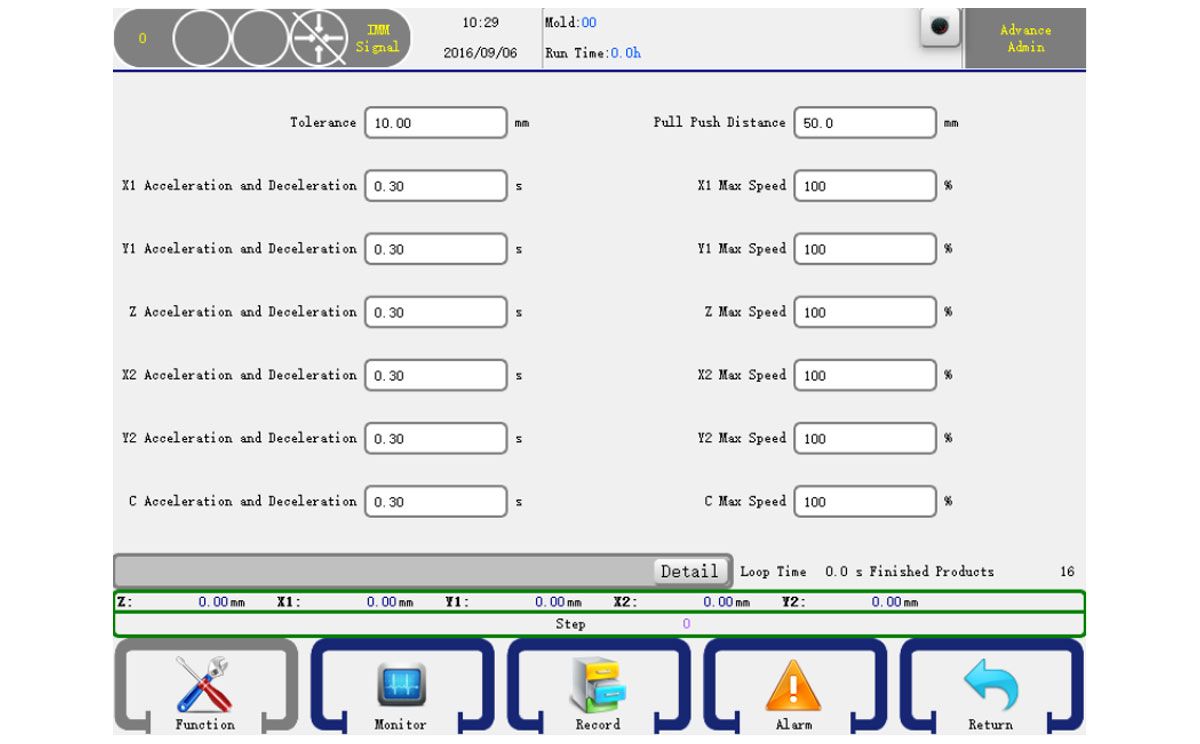
Tolerance: The tolerance between the sent pulse and feedback pulse of servo.
Safety Zone: A safety zone between arms and sub arms.
X, Y, Z Acceleration and Deceleration: The servo axis acceleration and decelatiion time.
X, Y, Z Max Speed: The max speed of the servo axis.
Click the Security Point Settings button to go into the security point settings page, as shown below:
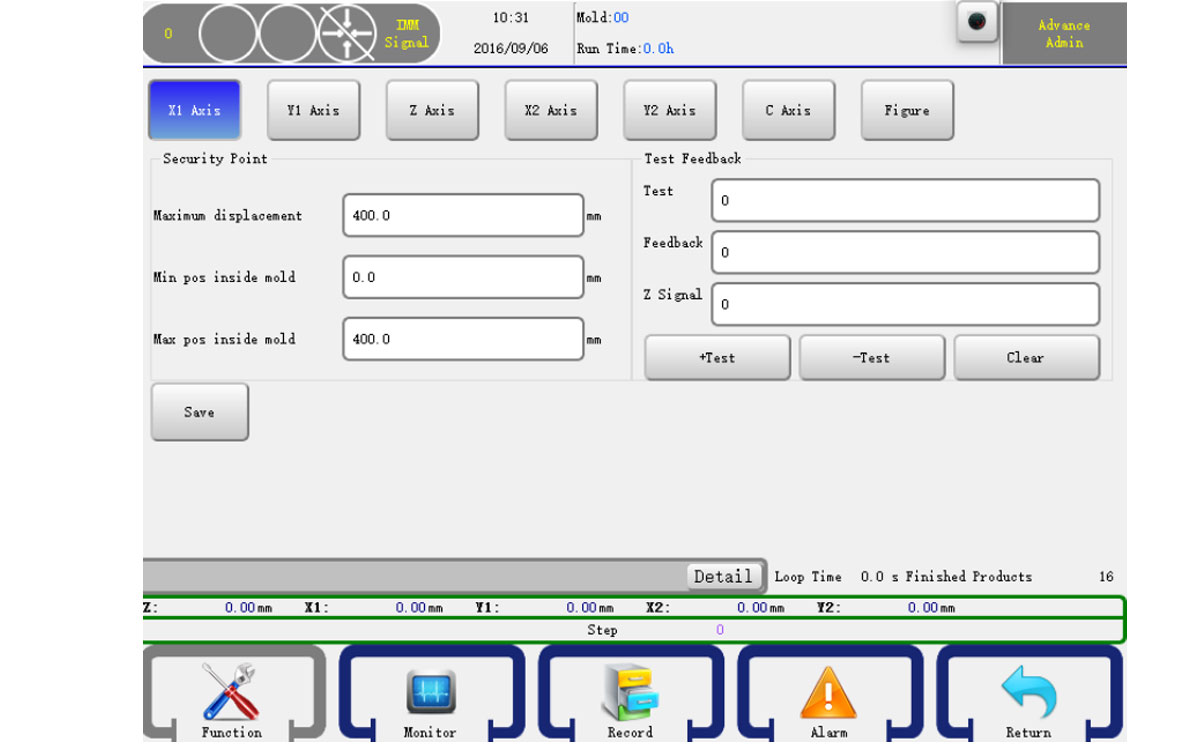
Attention: You can modify the X's minimum, maximum position in the mechanical parameters page X axis parameter field.
Click the Stack Settings item to go into the stack settings page, as shown below:
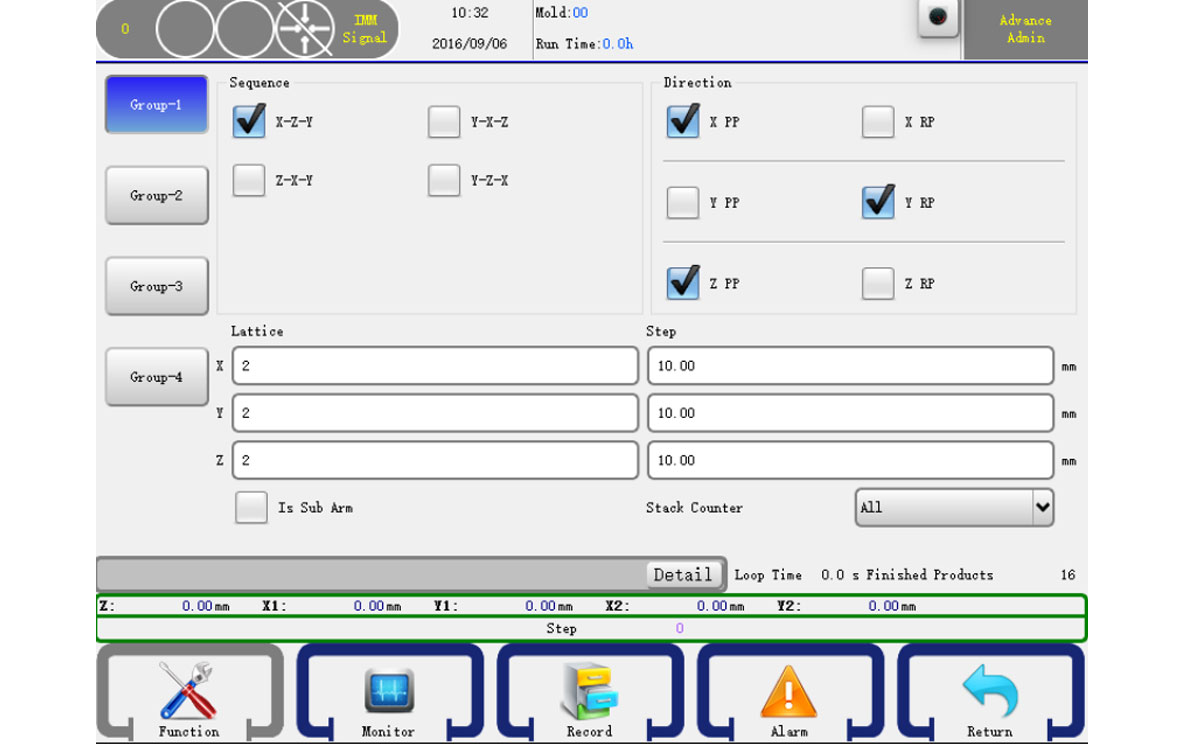
There are four group stack setting in our system.
Sequence: Select the stack sequence
X RP: If checked, the robot will stack reverse on the X axis.
Y RP: If checked, the robot will stack reverse on the Y axis.
Z RP: If checked, the robot will stack reverse on the Z axis.
7.6.1 Setting
Click the System Settings item to go into the system settings page, as shown below:
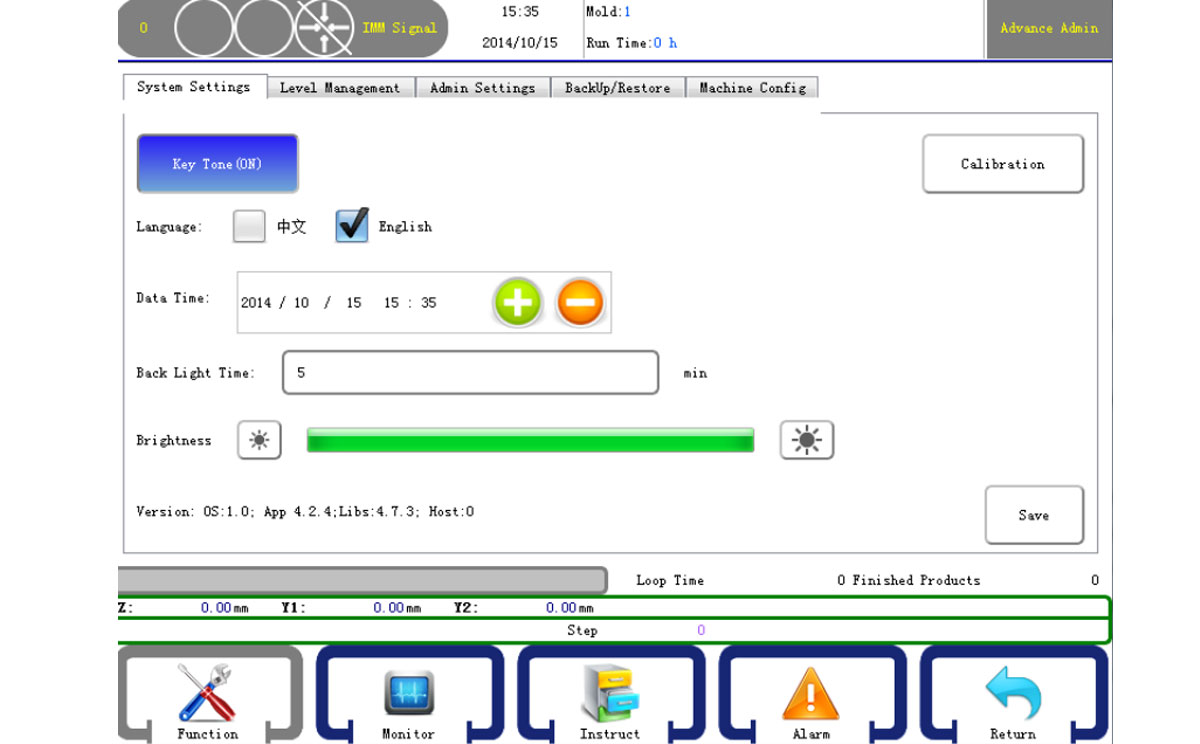
Key Tone: When press the keyboard will beep if on.
Language: Select the interface language.
Date Time: Set the current date time.
Back Light Time: If no action in the setting time, the back light will turn off.
Version: The version of the system.
Click the Save to confirm after the system settings done.
7.6.2 Level Management
Click the Level Management item to go into the system settings page, as shown below:
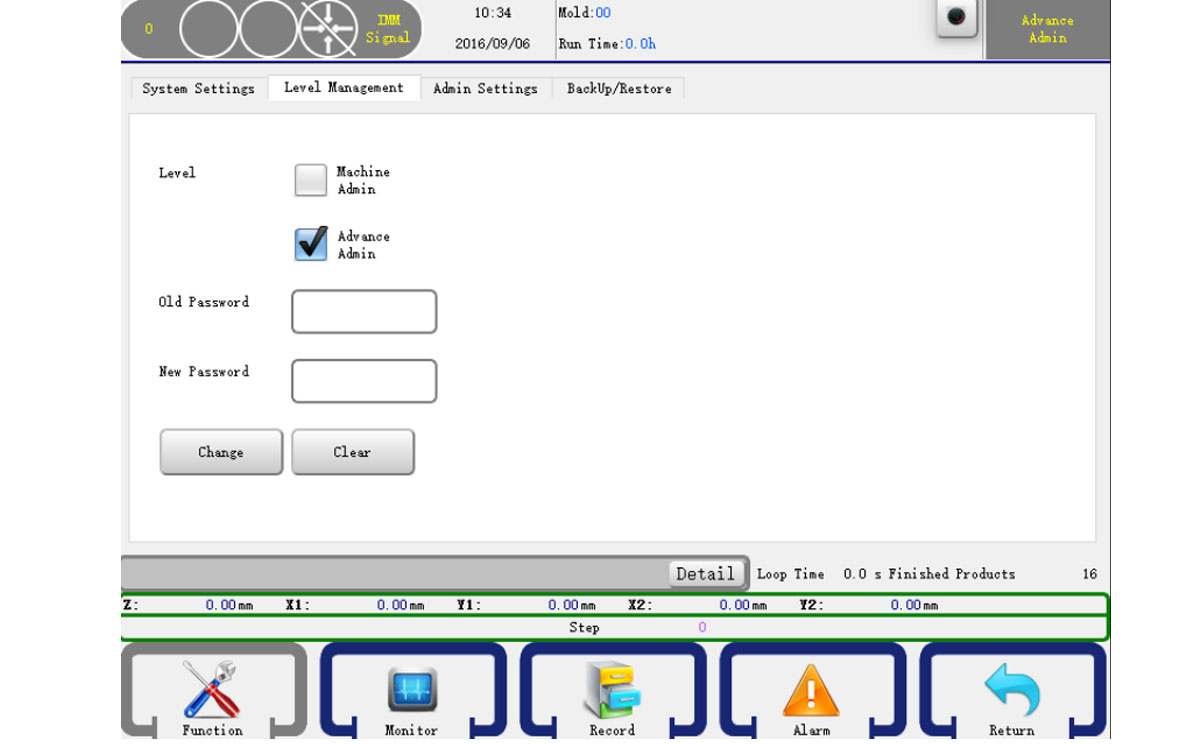
Level management can change the basic information while administer can modify any parameters. Enter the old password and then input a new one and confirm, you can change the password.
7.6.3 Backup/Restore
Click the Backup/Restore item to go into the system settings page, as shown below:
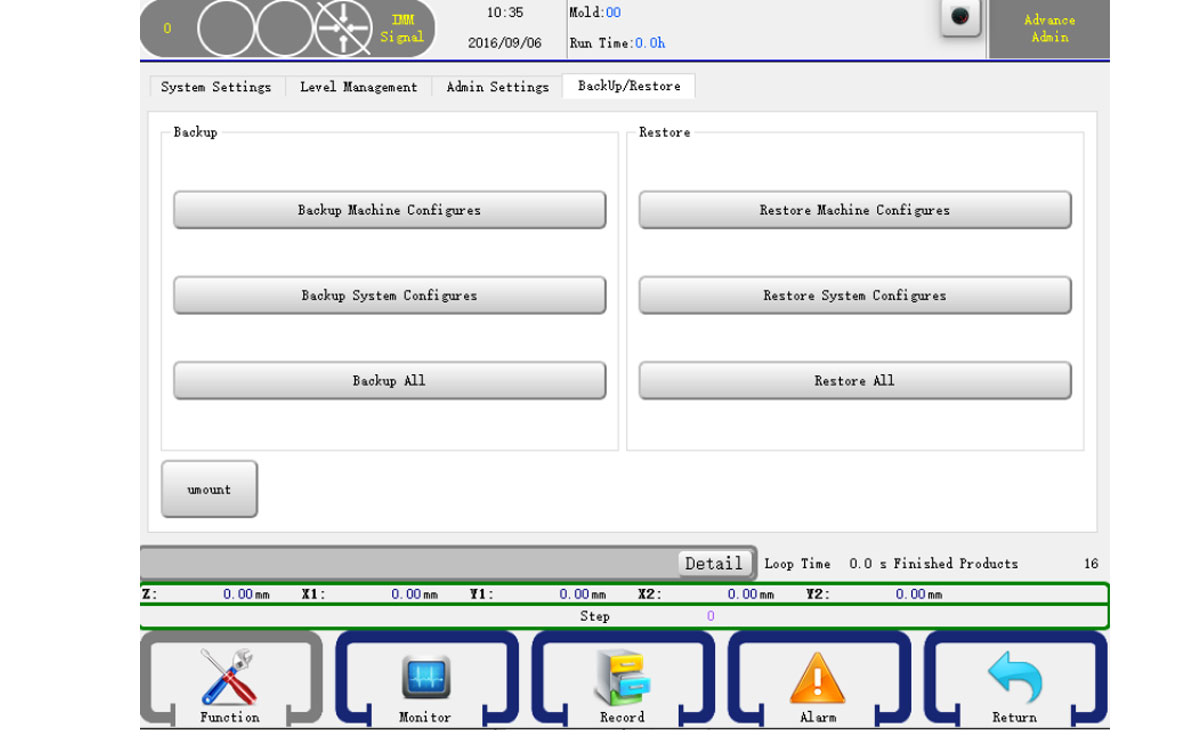
You can use USB to backup or restore "Machine Parameters", "System Parameters" and "Mold Parameters" or select all to backup/restore.
Click the Struct Settings item to go into the structure settings page, as shown below:
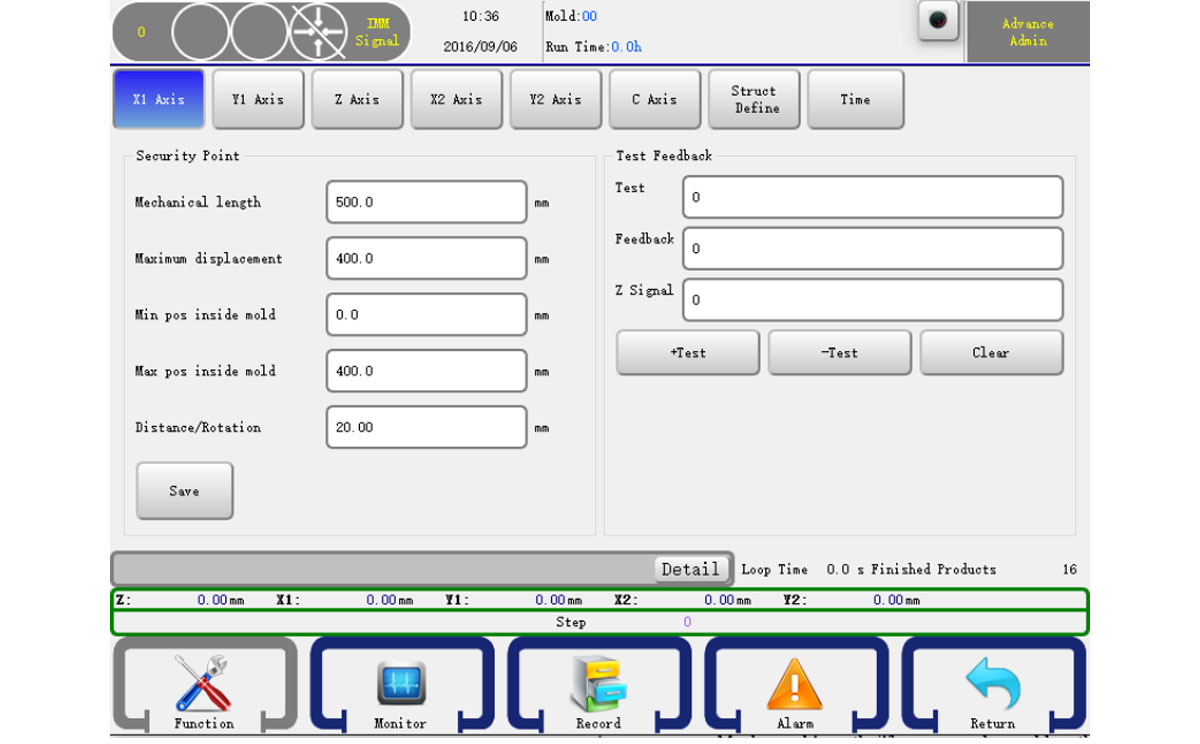
Mechanical Length: The axis mechanical length.
Distance/Rotation: The distance of one rotation of the servo.
You can also set other parameters as 5.4 please press the save button to confirm your change. WARNING: Struct define may cause damage to the machine and personal injury! Please contract the manufacturer.
Click the Maintains item to go into the maintain page, as shown below:
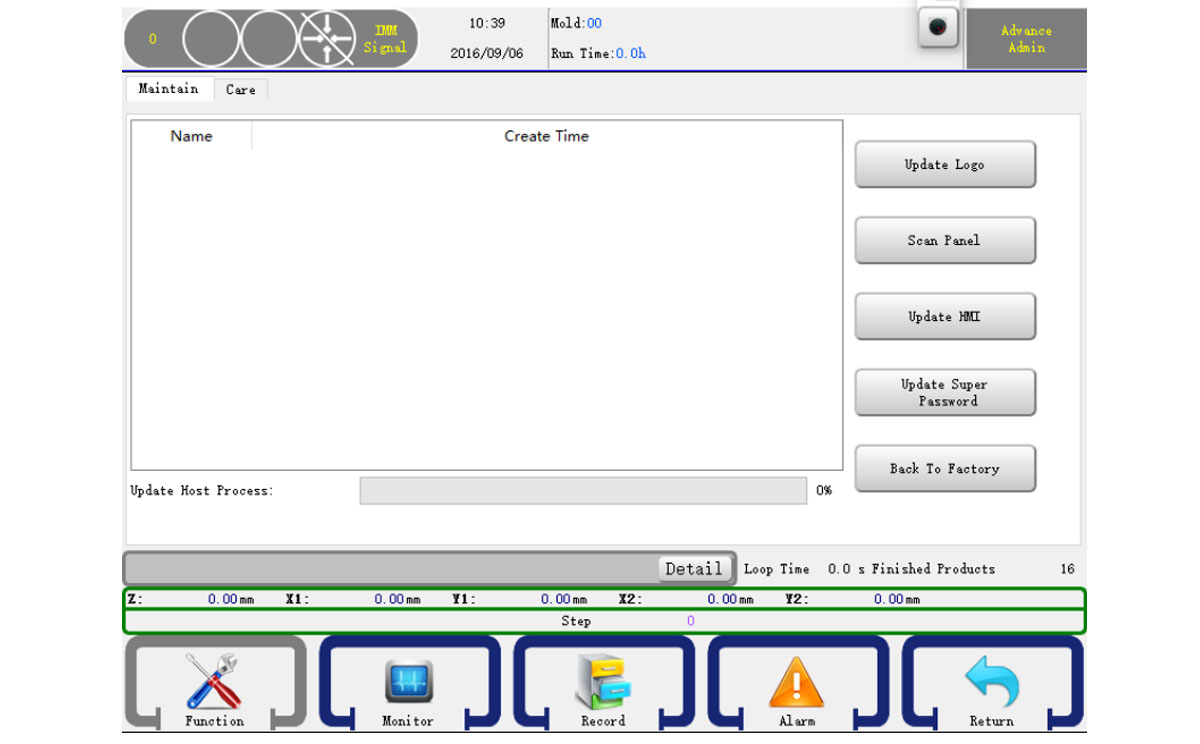
You can update the control panel system by a USB. Put the system update packet to a U disk. Click the Refresh button and wait for a while the page will show the system version if it can check the system update packet from the disk. If it can't, just press the refresh button again or use another U disk. If it check the system update packet, just click the Update button to start update system. After finish will show a message and the system will restart and then you can unplugin your U disk.
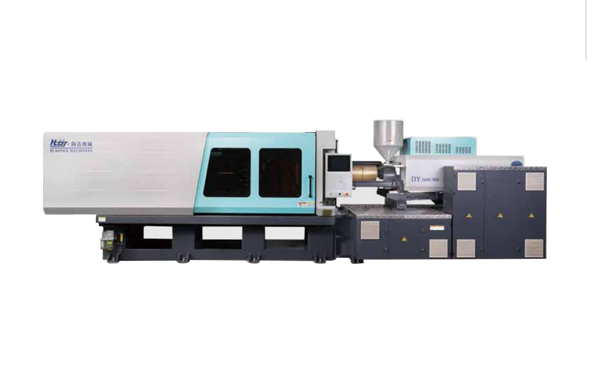
HD100LDY -- HaiDa Hybrid Injection Molding Machine
| No. | Name | Value |
|---|---|---|
| 1 | Clamping Force | 1000 kN |
| 2 | Shot Weight | 55 g |
| 3 | Shot Speed | 200 mm/s |
| 4 | Screw Diameter | 26 mm |
| 5 | Opening Stroke | 330 mm |
| 6 | Space Between Tie Bars | 370 x 370 mm |
| 7 | Mold Thickness (Min) | 140 mm |
| 8 | Mold Thickness (Max) | 380 mm |
| 9 | Pumper Motor | 34 kW |
| 10 | Heating Capacity | 5 kW |
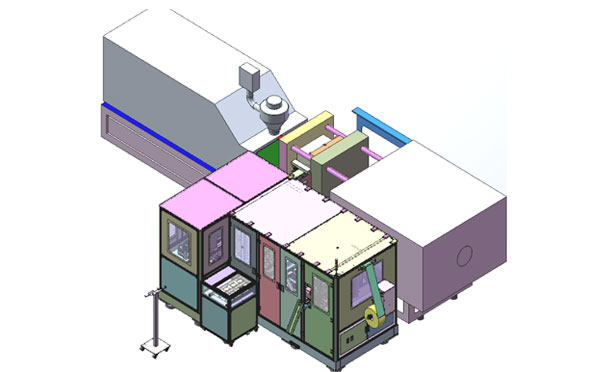
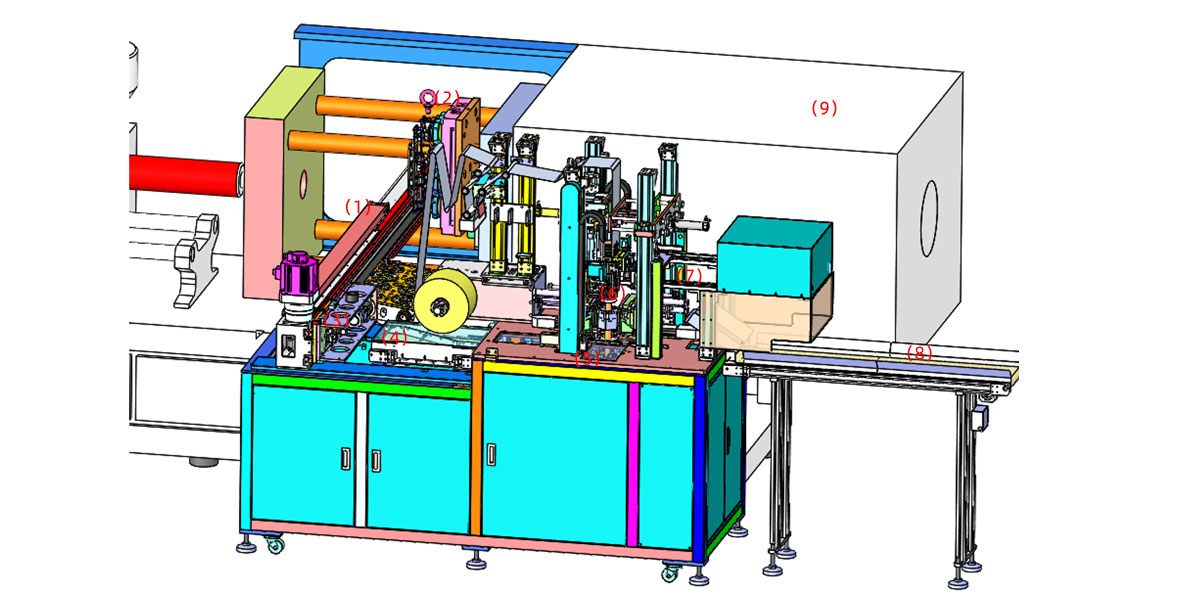
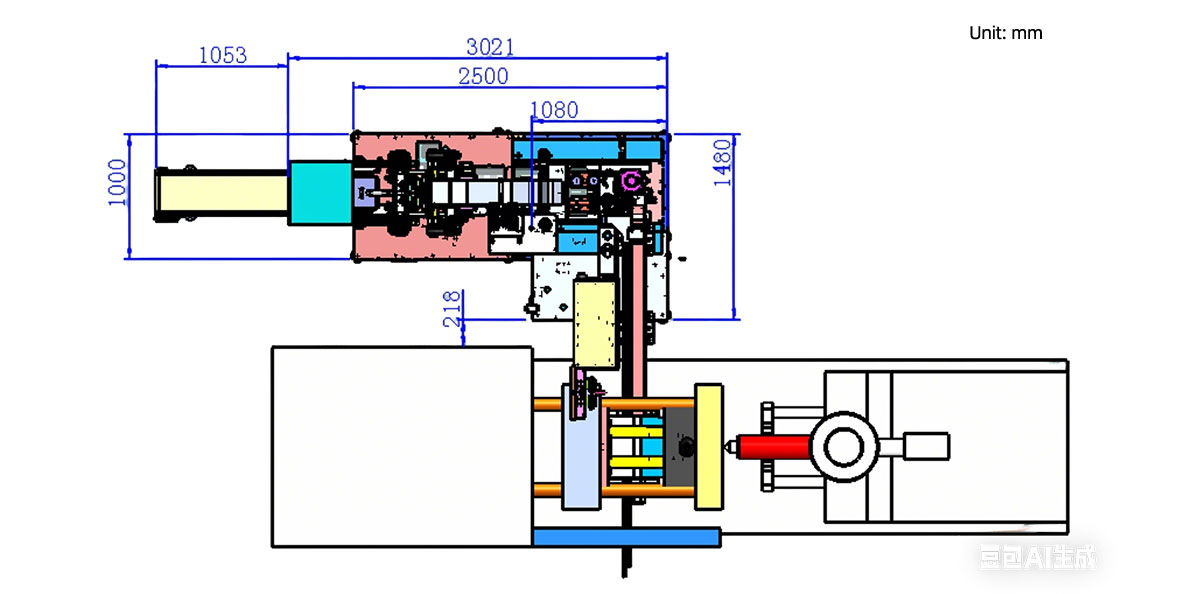
The SWITEK side entry petri dish packing system is a custom made automation system for the stable production of laboratory consumable plastic petri dish with the picking robot, the petri dish assembly, stacking, packing unit etc. integrated as auniformed system for the efficient and stable production of the petri dish. The system can be custome made for a petri dish mold layout design of 2+2, 4+4, 6+6, 8+8 etc.
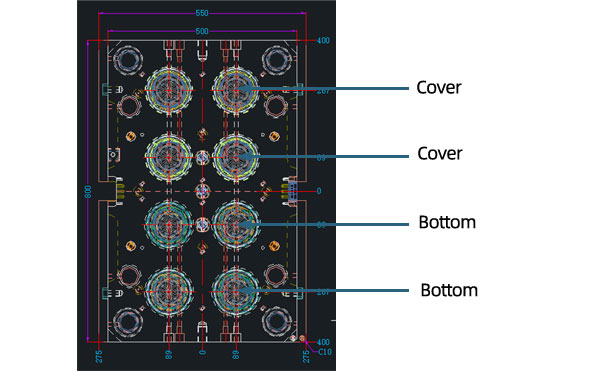
Mold Layout Deisgn
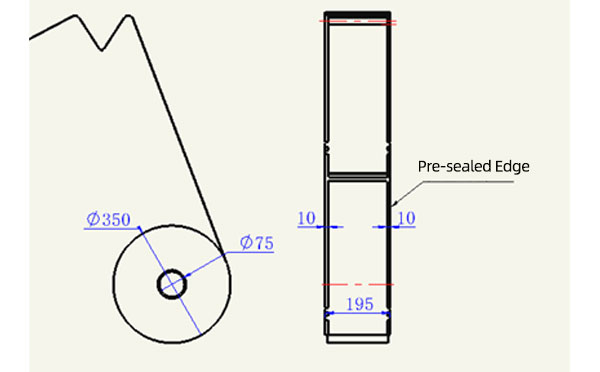
Sleeve Size for Package with Vacuum Request
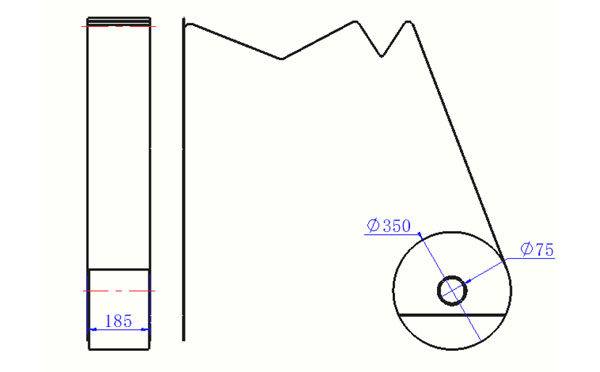
Sleeve Size for Package without Vacuum Request
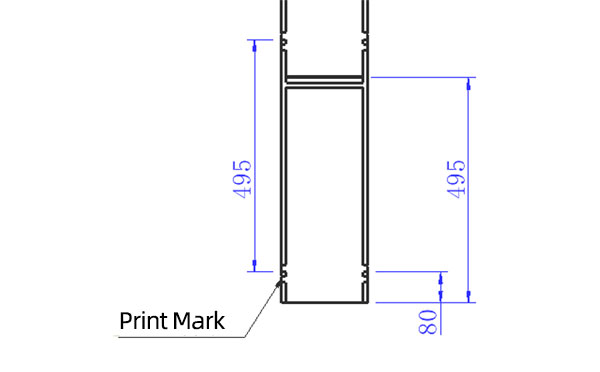
Sleeve (With Mark) Size for Package with Vacuum Request
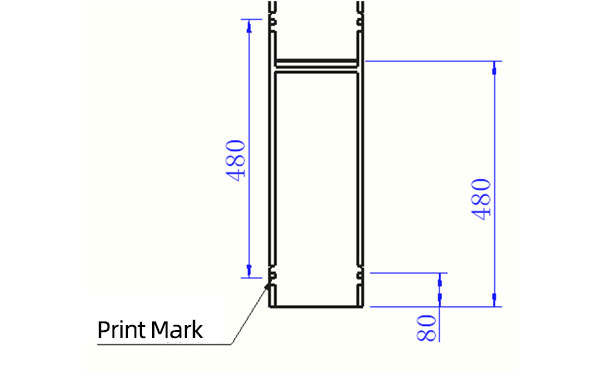
Sleeve (With Mark) Size for Package without Vacuum Request
I think you'll have an overall understanding about the SWITEK top/side entry petri dish packing system. If you still have any other question about it or need any help in your petri dish production project, please feel free to contact SWITEK laboratory consumable plastic parts injection molding solutions team for more information.
HuangYanZheng©Copy Right


