Instrucciones de instalación de los brazos robóticos SWITEK para máquinas de moldeo por inyección -- Capítulo 10: Diagrama de cableado
Abstracto
En este capítulo encontrará el diagrama de cableado detallado de un brazo robótico servo SWITEK de 3/5 ejes para máquinas de moldeo por inyección, que incluye el cableado de las E/S, la placa principal al panel y la placa principal al servo. El objetivo de este capítulo es que comprenda el control del brazo robótico servo SWITEK de 3/5 ejes. El brazo robótico.
10.1 Placa principal a placa de E/S
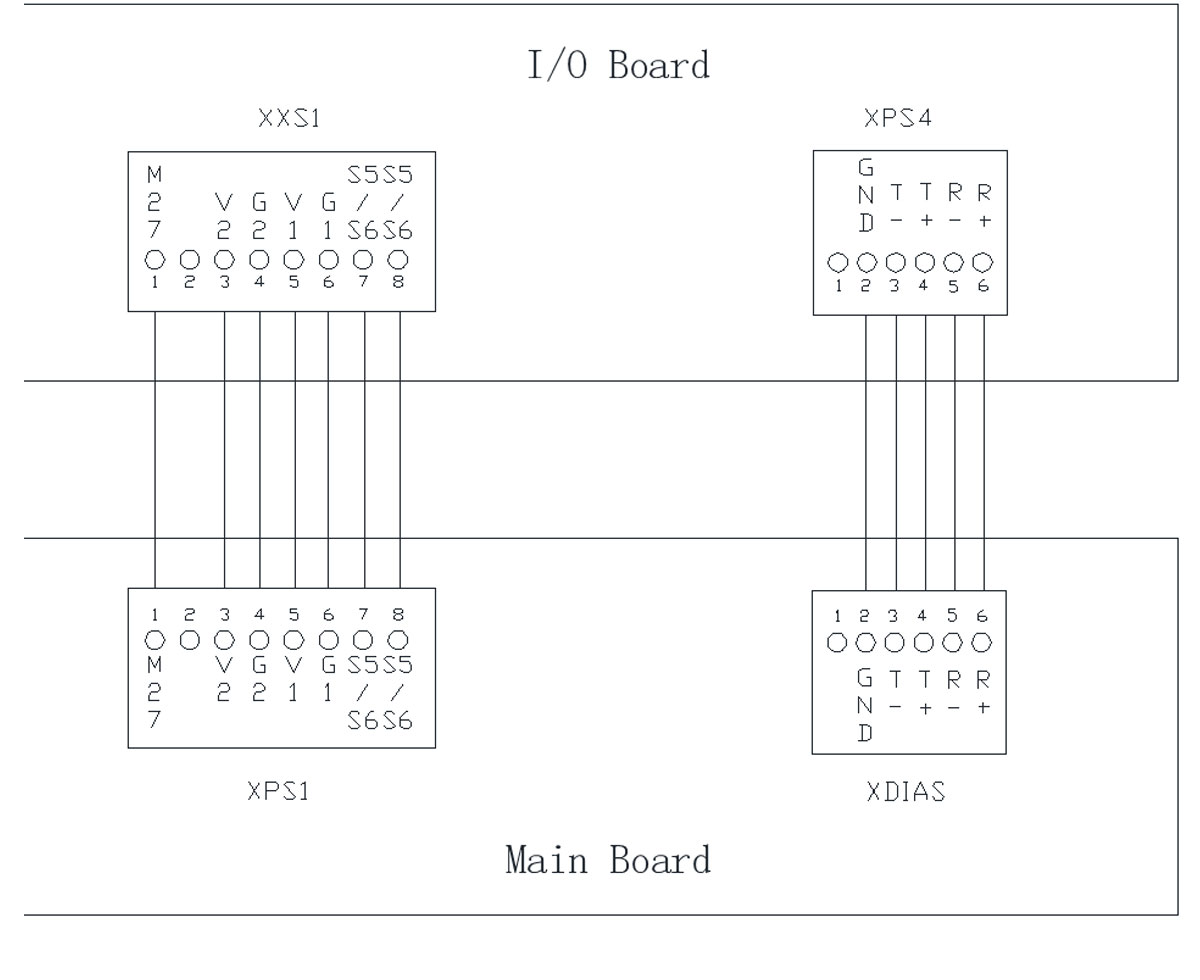
La placa principal generará la señal de control y la distribuirá a través de la placa de E/S para controlar los brazos robóticos y completar el complejo proceso de automatización.
10.2 Placa principal de E/S al panel
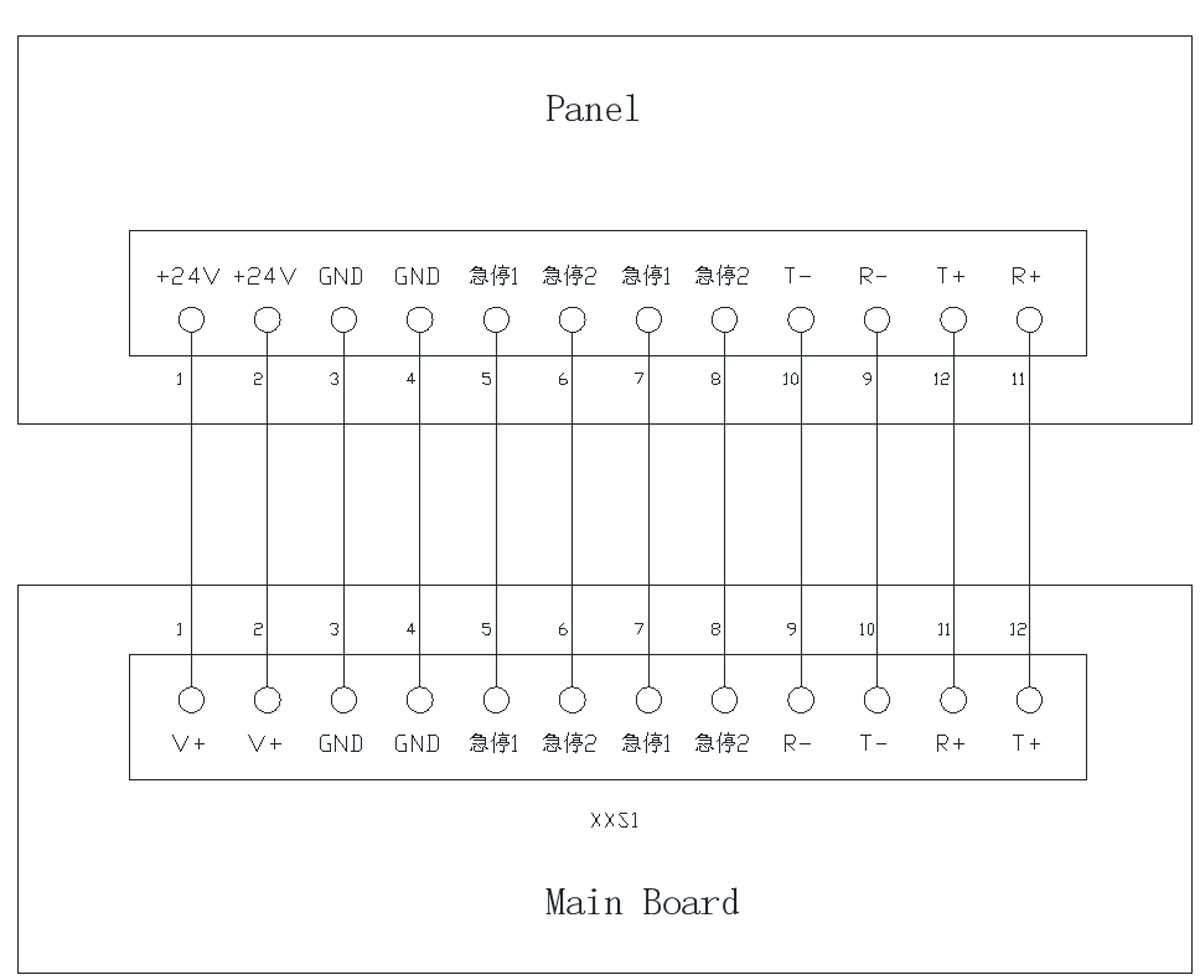
La placa principal recibe las instrucciones de funcionamiento del panel de control. Este diagrama muestra las instrucciones de cableado para la conexión de la placa principal y el panel de control del brazo robótico.
10.3 Placa principal HC-S3 a servo
Seleccione el modo de posición para el sistema servo. El tipo de pulso de comando es de avance y retroceso. La frecuencia máxima es de 500 kHz.
10.3.1 Conectar con Panasonic A6
Ajustes del servo A6
| No. | Nombre | Configuración |
|---|---|---|
| Pr0.01 | Modo de control | 0 |
| Pr0.05 | Selección de pulso de entrada | 1 |
| Pr0.06 | Pulso de entrada positivo | 0 |
| Pr0.07 | modo de pulso de entrada | 1 |
| Pr0.08 | Pulso del círculo motor | 10000 |
| Pr0.11 | Pulsación para círculo | 2500 |
| placa base | Panasonic A6 | ||||
|---|---|---|---|---|---|
| Alfiler | Definir | Alfiler | Definir | ||
| 1 | P+ | Pulso positivo | 3 | PULS1 | Entrada de pulso 1 |
| 2 | P- | 4 | PULS2 | ||
| 3 | S+ | Pulso negativo | 5 | SIGN1 | Entrada de pulso 2 |
| 4 | S- | 6 | SIGN2 | ||
| 5 | A+ | Fase A del pulso de retroalimentación | 21 | OA+ | Salida de la fase A |
| 6 | A- | 22 | OA- | ||
| 7 | B+ | Fase B del pulso de retroalimentación | 48 | OB- | Salida de fase B |
| 8 | B- | 49 | OB- | ||
| 9 | Z+ | Fase Z del pulso de retroalimentación | 23 | OZ+ | Salida de fase Z |
| 10 | Z- | 24 | OZ- | ||
| 13 | GND | Tierra de señal | 13 | GND | Tierra de señal |
| 26 | +24V | Fuente de alimentación de +24 V | 7 | COM+ | Alimentación externa + |
| 25 | 0V | Tierra eléctrica | 41 | COM- | Alimentación externa - |
| 36 | ALM- | Alarma | |||
| 15 | ALARM | Alarma | 37 | ALM+ | |
| 23 | SON | Servo-On | 29 | SRV-ON | Servo-On |
10.3.2 Conexión con MITSUBISHI MR-E
Ajustes del servo MR-E
| No. | Nombre | Colocar |
|---|---|---|
| No.0 | Modo de control | ***0 |
| No.1 | Selección de ruptura | 0012 |
| No.3 | Numerador | 14 |
| No.4 | Denominador | 1 |
| No.21 | Selección de modo de pulso | 0000 |
| No.27 | Pulso fuera | 14 |
| No.54 | Pulso fuera | 1*** |
(Para motor de pulso/ciclo 131072)
| Placa base | MITSUBISHI MR-E | ||||
|---|---|---|---|---|---|
| Alfiler | Definir | Alfiler | Definir | ||
| 1 | P+ | Pulso positivo | 23 | PP | Entrada de pulsos |
| 2 | P- | 22 | PG | ||
| 3 | S+ | Pulso negativo | 25 | NP | Entrada de pulso 2 |
| 4 | S- | 24 | NG | ||
| 5 | A+ | Fase A del pulso de retroalimentación | 15 | LA | Salida de la fase A |
| 6 | A- | 16 | LAR | ||
| 7 | B+ | Fase B del pulso de retroalimentación | 17 | LB | Salida de fase B |
| 8 | B- | 18 | LBR | ||
| 9 | Z+ | Fase Z del pulso de retroalimentación | 19 | LZ | Salida de fase Z |
| 10 | Z- | 20 | LZR | ||
| 13 | GND | Tierra de señal | 14 | LG | Base lógica |
| 26 | +24V | Fuente de alimentación de +24 V | 1 | VIN | Alimentación DC24V+ |
| 25 | 0V | Tierra eléctrica | 13 | SG | Alimentación de 24 V CC |
| 15 | ALARM | Alarma | 9 | ALM | Alarma |
| 23 | SON | Servo-On | 4 | SON | Servo-On |