
Instrucciones de instalación de los brazos robóticos SWITEK para máquinas de moldeo por inyección - Capítulo 6: Gestión de registros
Abstracto
El brazo robótico servo SWITEK de 3/5 ejes puede grabar más de 100 programas para diferentes diseños de moldes. En este capítulo, le mostraremos cómo crear un nuevo programa, hacer una copia de seguridad de un programa existente y recargarlo desde una memoria USB, y cómo reaccionará el brazo robótico al programa, etc.
6.1 Crear y cargar programa
En el estado de detención, haga clic en el botón de grabación en la barra de menú para acceder a la página de gestión de registros. Puede mantener sus programas en esta página, como se muestra a continuación:
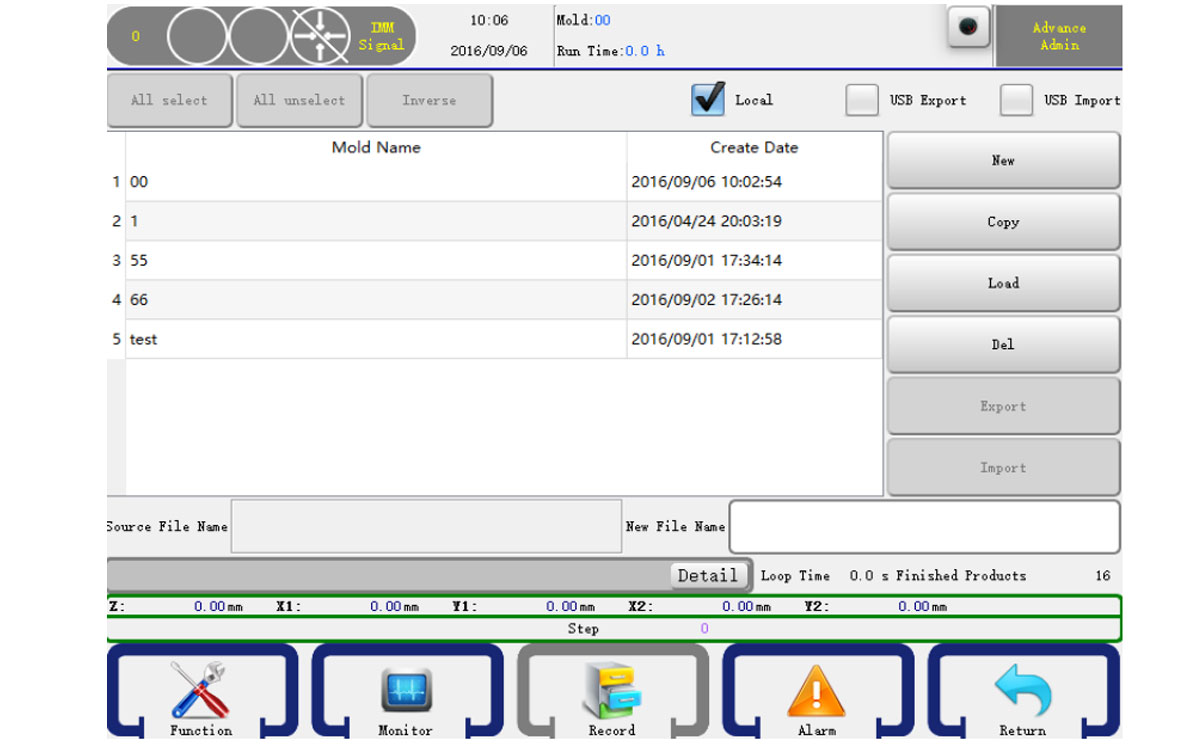
- Crear programa: Ingrese un nombre de programa en el cuadro de nombre de archivo y luego haga clic en el botón nuevo para crear un nuevo programa.
- Copiar programa: Ingrese el nombre de un programa en el cuadro de nombre de archivo y luego haga clic en el botón Copiar para copiar un programa a un nuevo programa.
- Cargar programa: Seleccione un programa y luego haga clic en el botón Cargar para cargar un programa.
- Eliminar programa: Seleccione un programa y haga clic en el botón Eliminar para eliminarlo. El programa actual no se puede eliminar.
- Exportar programa: Seleccione un programa y luego haga clic en el botón exportar para hacer una copia de seguridad del programa en una memoria USB.
6.2 Instrucción del programa
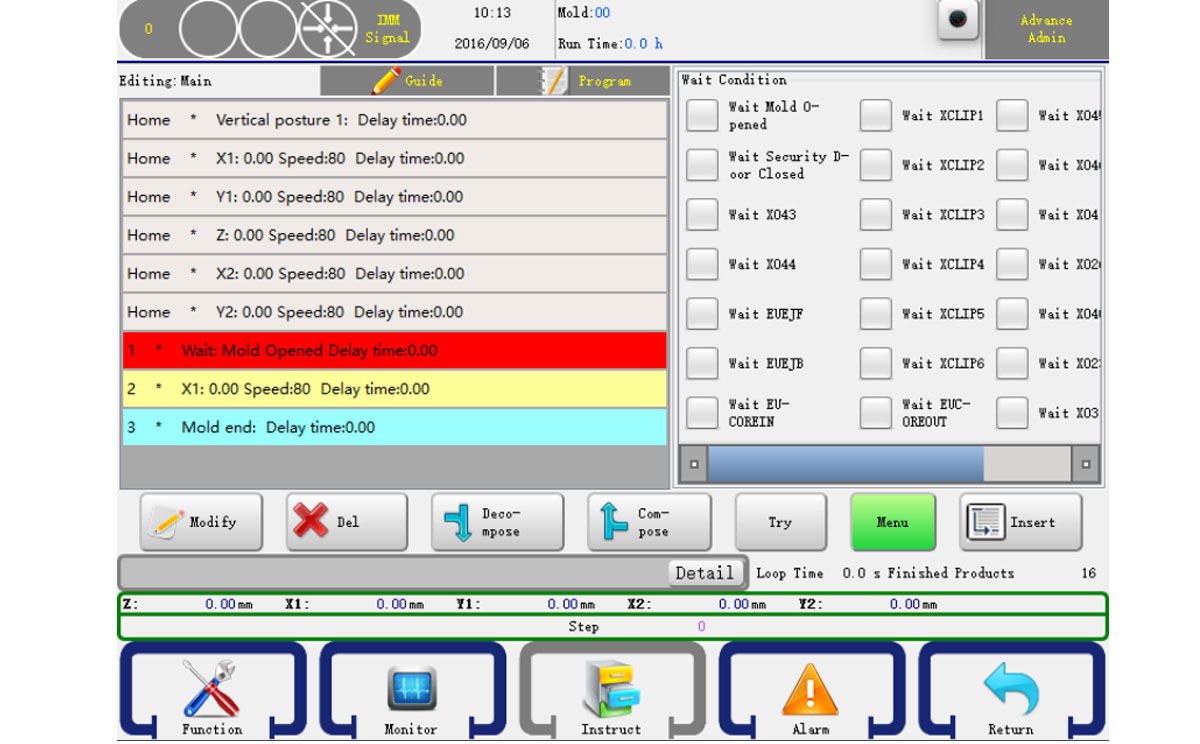
Gire la perilla hacia la izquierda para acceder al modo manual y luego haga clic en el botón de aprendizaje en la barra de menú principal para abrir el editor de programas. Como se muestra a continuación:
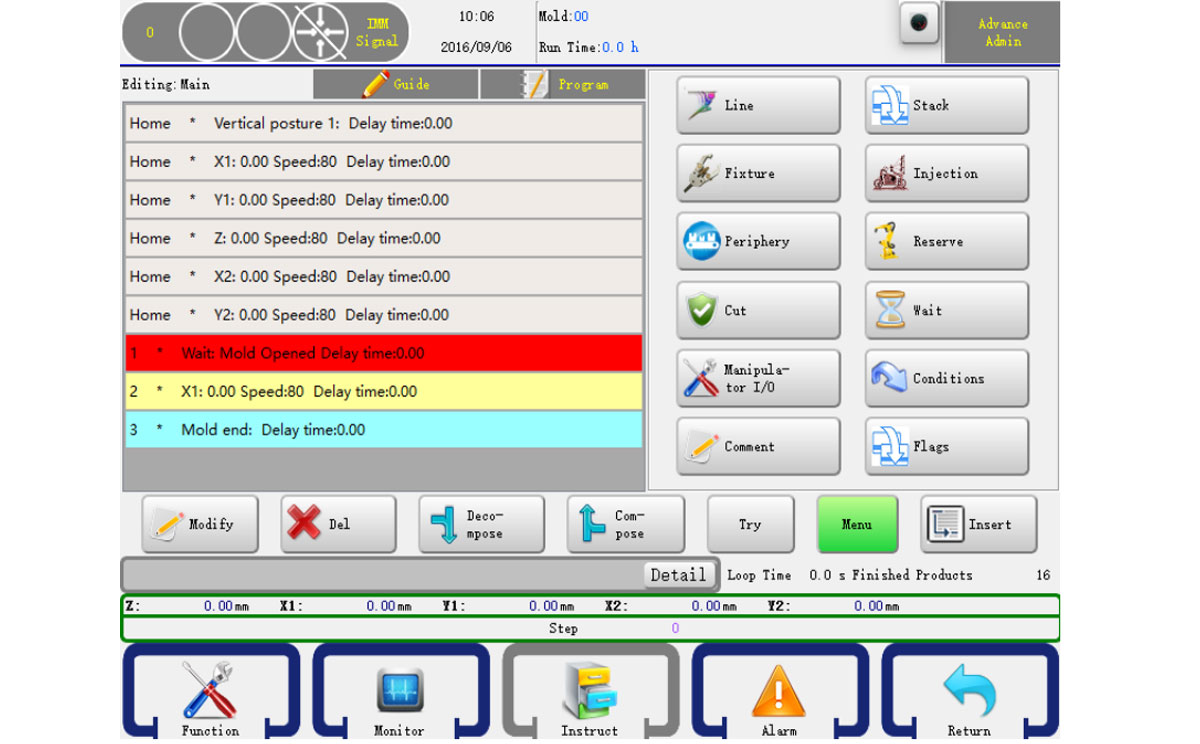
Las acciones de servo, pila, fijación, inyección, auxiliar, reserva, verificación, espera, serie y periferia se incluyen en el botón "Instruir". Haga clic en estos botones para editar un programa. Pulse "Instruir" para volver al menú.
En el modo de instrucción, tras seleccionar las acciones que desea combinar, haga clic en "Combinación" para obtener el mismo paso de acción, que se ejecuta simultáneamente en la operación automática. También puede separar un paso combinado en varios pasos pulsando el botón "Interrumpir".
6.2.1 Acción del servo
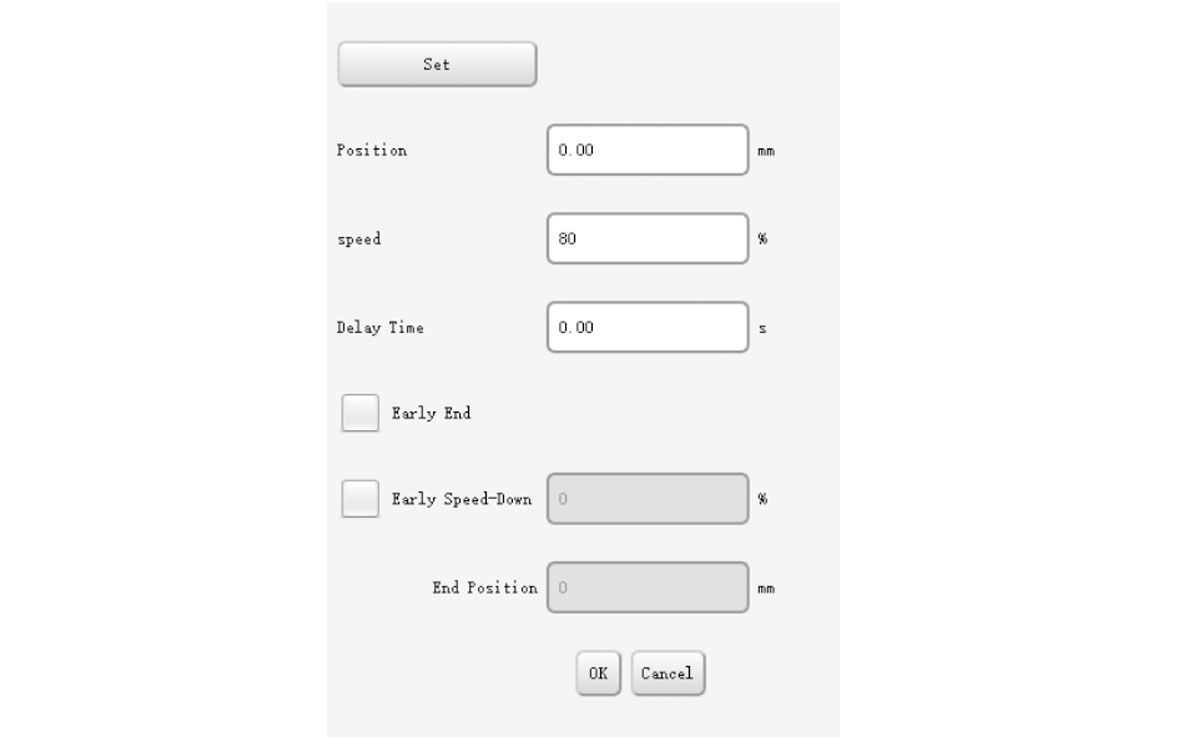
Haga clic en el botón Línea para acceder al editor de acciones del servo. Puede configurar el estado de los ejes X1(X2), Y1(Y2), Z y C(Postura), como se muestra a continuación:
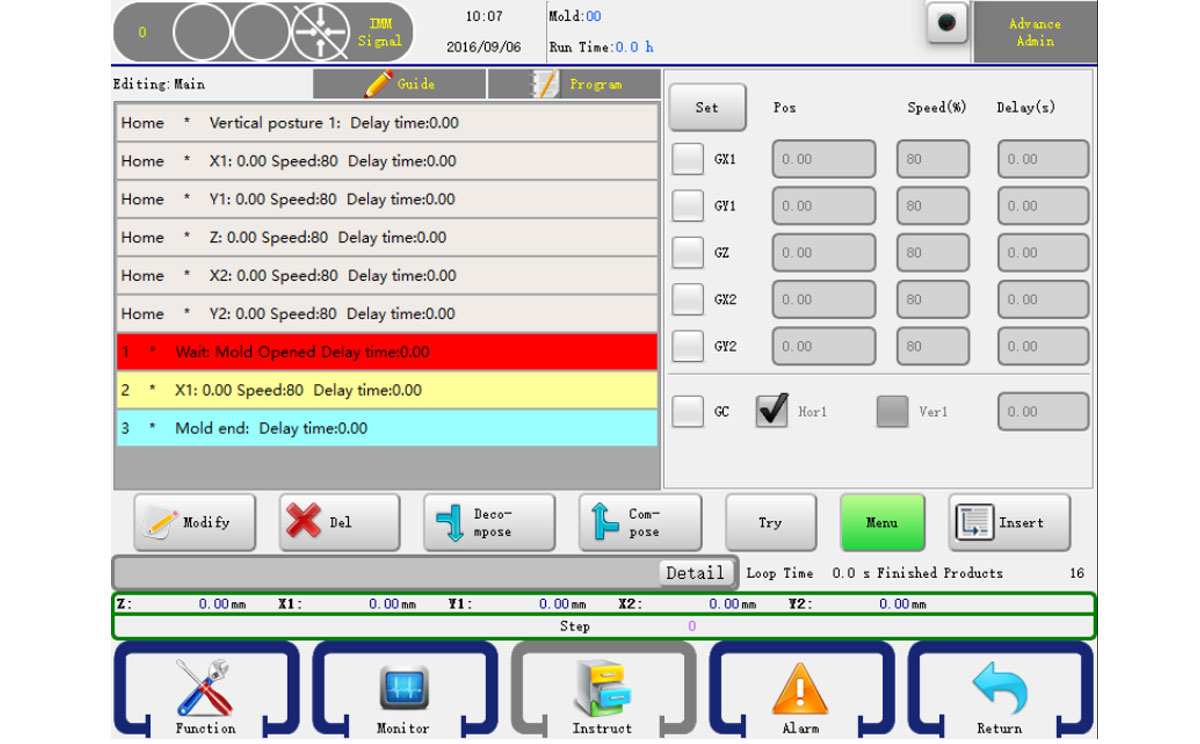
En esta página, puede configurar la posición de los ejes X1(X2), Y1(Y2) y Z, la velocidad de operación y el tiempo de retardo. Después de hacer clic en el icono √ a la izquierda, configure los parámetros de los ejes, selecciónelos y haga clic en el botón "Insertar" para confirmar los ajustes correspondientes y añadirlos a los pasos del programa.
Hay dos formas de establecer la posición del eje:
- Introduzca la posición que desea en el cuadro del editor.
- Presione el botón del eje en el teclado para mover el brazo a la posición deseada y luego haga clic en el botón configurar.
6.2.2 Punto de inicio del programa
Los seis pasos se muestran como la posición de origen y la pose de seis ejes.
Los seis pasos del estado [Inicio] anteriores, que son los pasos predeterminados en un nuevo programa, se pueden editar simplemente haciendo clic en "Editar" para modificar la posición inicial, la velocidad de operación y el tiempo de retardo de los ejes. No se pueden eliminar.
6.2.3 Acción de pila
Haga clic en el botón Pila para ir al editor de acciones estáticas, como se muestra a continuación:
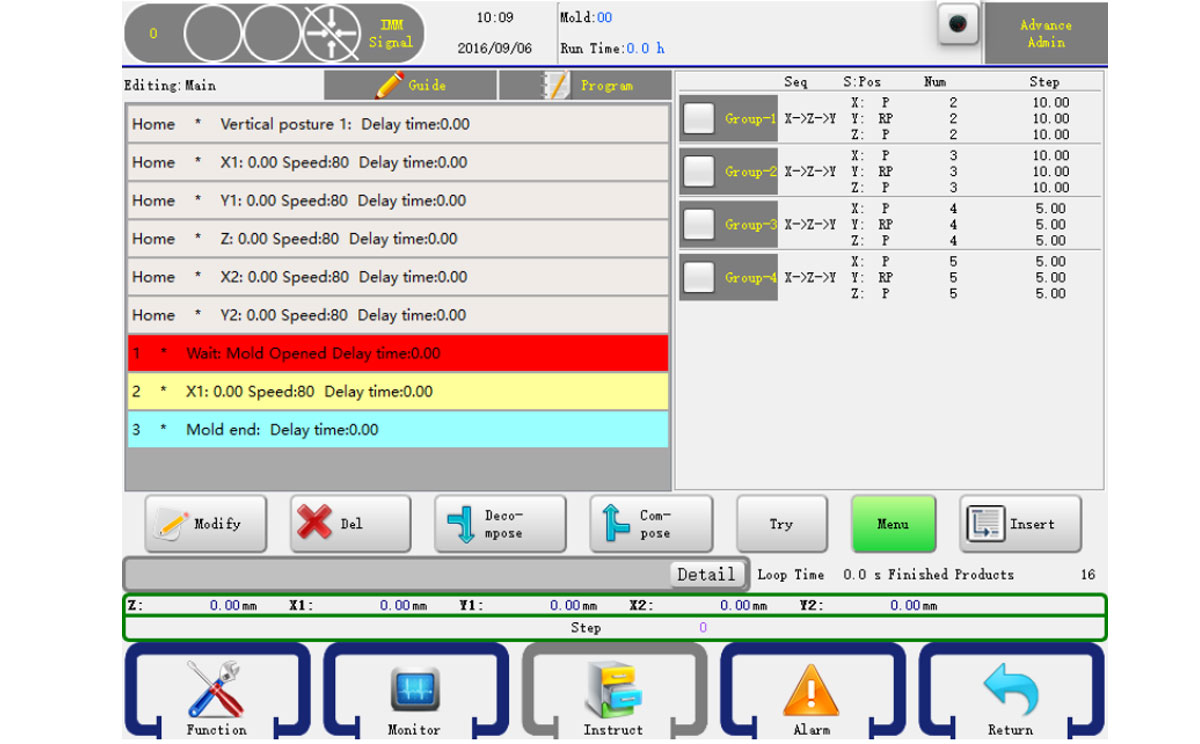
Seleccione el lado izquierdo de la pila para insertar el grupo de programas, configúrelo y haga clic en el botón Insertar frente al paso de apilamiento. El robot apilará los productos según el orden en que se encuentren durante la operación automática.
Si desea utilizar el eje Y para apilar, debe asegurarse de que la pila esté insertada antes de realizar la operación de bajada del eje Y.
6.2.4 Acción del accesorio
Haga clic en el botón Accesorio para acceder al editor de acciones de accesorios y ventosas, como se muestra a continuación:
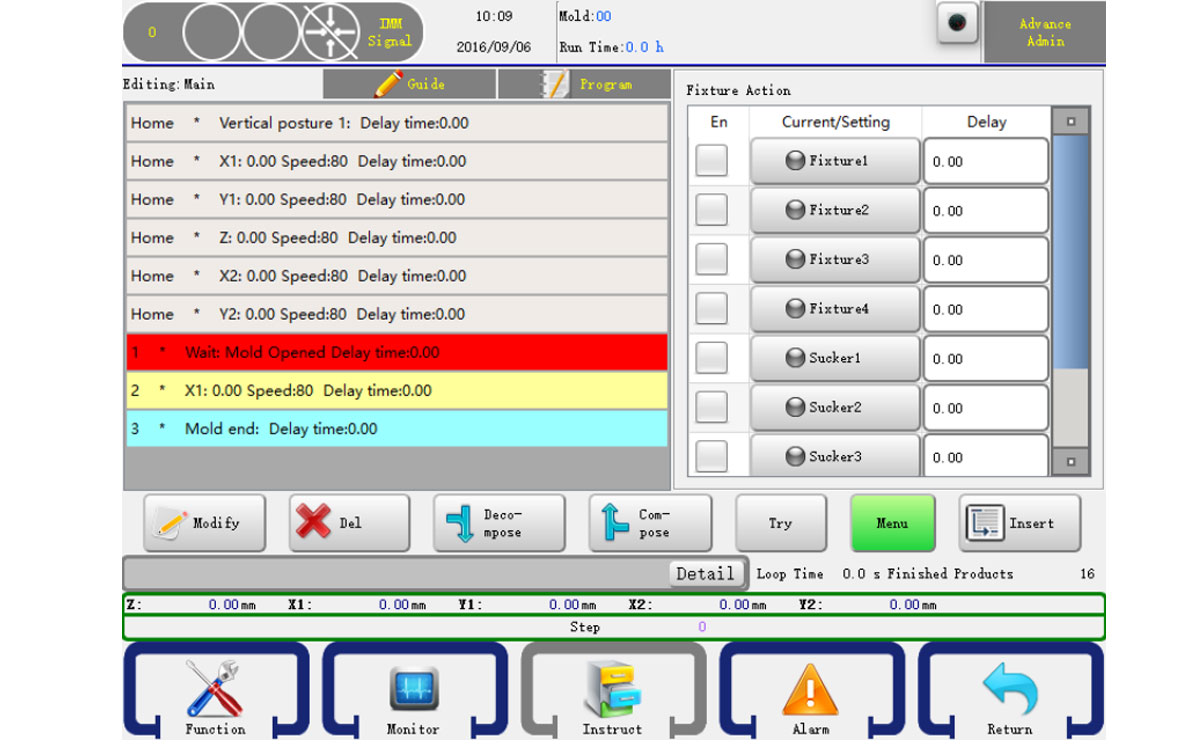
El controlador puede configurar cuatro dispositivos y dos acciones de succión. Al hacer clic en el botón a controlar, el indicador se vuelve rojo al emitirse. Luego, haga clic a la izquierda para que se convierta en &. Al hacer clic en "Insertar", el paso de acción se inserta en los pasos iniciales del procedimiento de selección.
Después de insertar la fijación y la acción de succión, asegúrese de insertar la acción de verificación; de lo contrario, el programa no probará su señal de confirmación. Si no reconoce la señal, no necesitará la acción de verificación. De todos modos, es mejor tener la acción de verificación activada para proteger la máquina.
6.2.5 Acción de IMM
Haga clic en el botón Inyección para ir al editor de acciones de inyección, como se muestra a continuación:
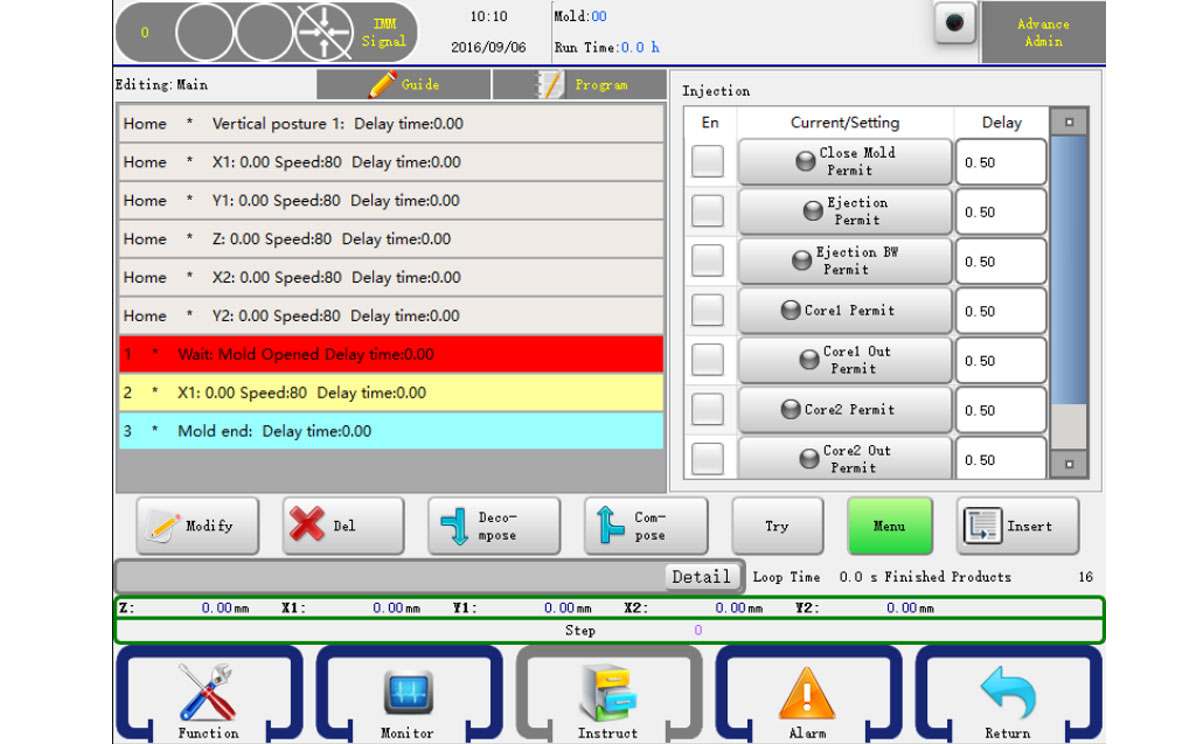
El funcionamiento es el mismo que el de la acción de fijación del programa. Véase 6.2.4.
6.2.6 Acción auxiliar
Haga clic en el botón Auxiliar para acceder al editor de acciones periféricas. En este editor encontrará las acciones de inyector, transportador, punto de reserva y pila, como se muestra a continuación:
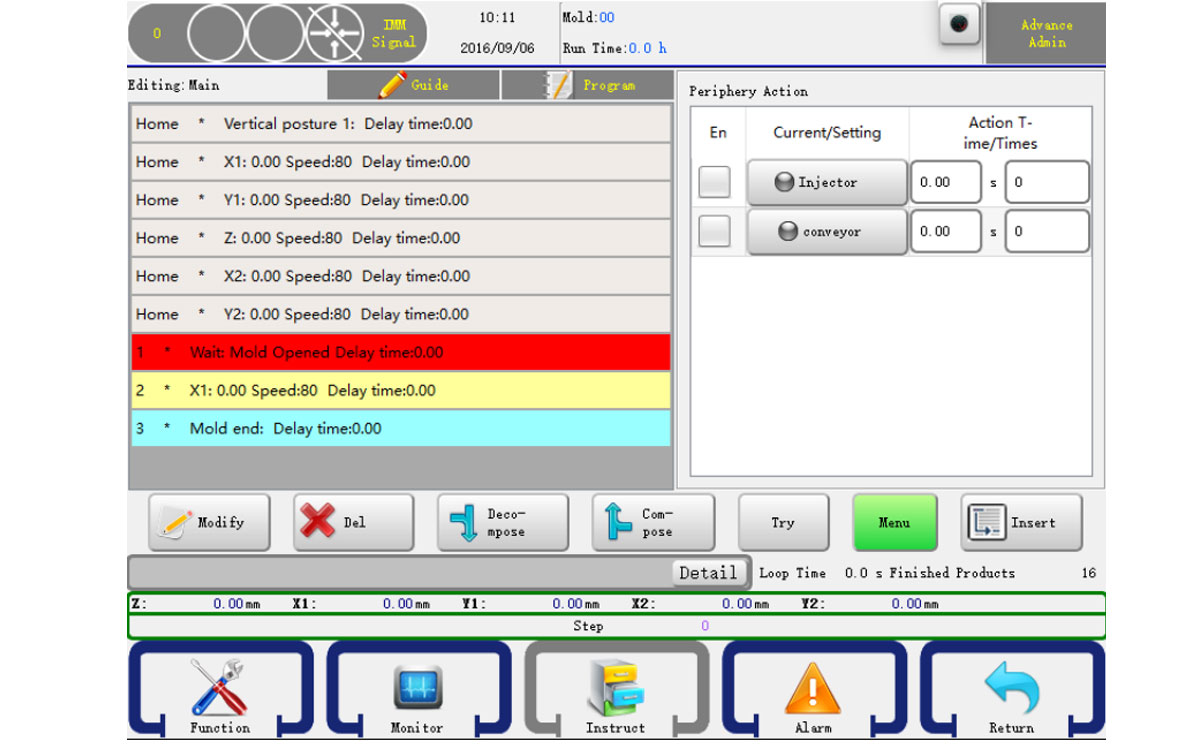
El funcionamiento es el mismo que el de la acción de fijación del programa. Véase 6.2.4
Veces: Indica el tiempo que se debe ejecutar la acción en un ciclo.
Retardo: Establece cuántos moldes se ejecutan automáticamente al salir, por ejemplo, uno o dos, etc.
6.2.7 Acción de reserva
Haga clic en el botón Reservar para acceder al editor de acciones. Como se muestra a continuación:
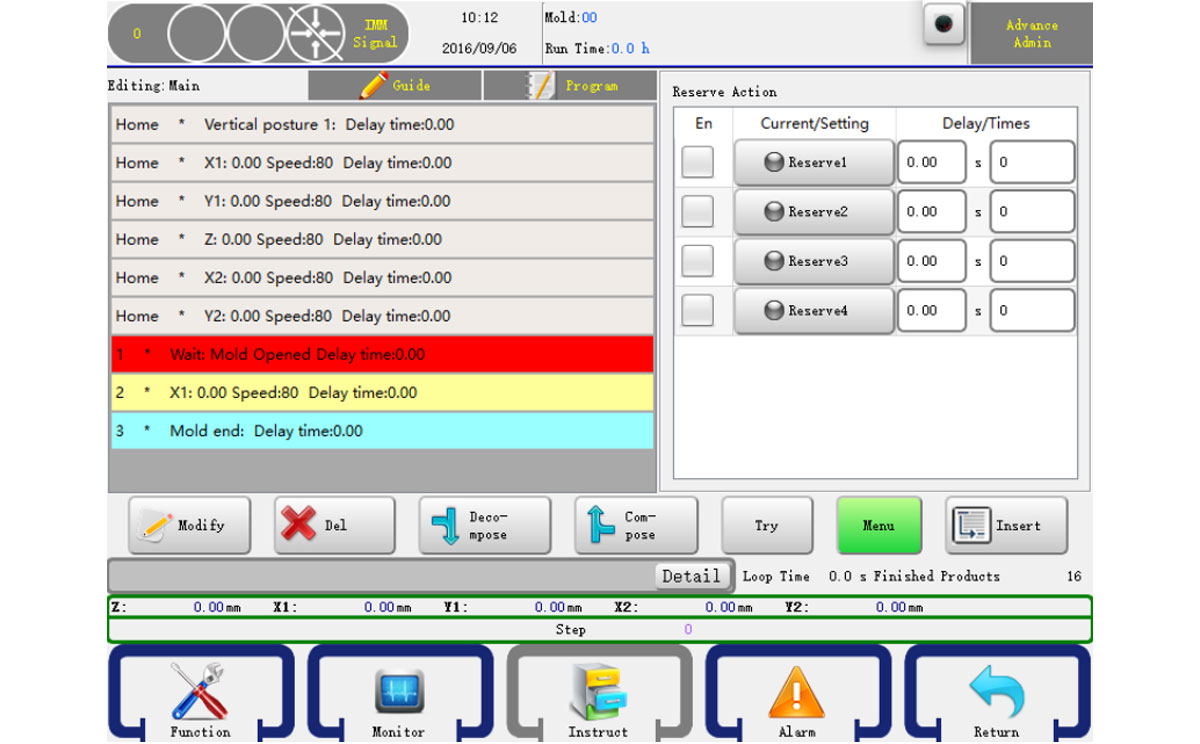
Hay cuatro reservas en el sistema.
Tiempos:Indica cuánto tiempo se debe ejecutar la acción en un ciclo.
Retardo:Establece cuántos moldes se ejecutan automáticamente al salir, por ejemplo, uno o dos, etc.
6.2.8 Acción de espera
Haga clic en el botón de espera para acceder al editor de acciones de espera. Este tipo de acción significa que el programa se detendrá antes de que se active la señal de entrada que desea esperar. El editor se muestra a continuación:
Simplemente marque la señal que desea esperar y haga clic en el botón Insertar para confirmar el cambio.
6.2.9 Comentario
Haz clic en el botón "Comentar" para acceder al editor de comentarios, donde puedes comentar sobre el programa.

Puede utilizar el teclado virtual para ingresar la información.

6.2.10 Condiciones
También puedes establecer condiciones en tu programa:
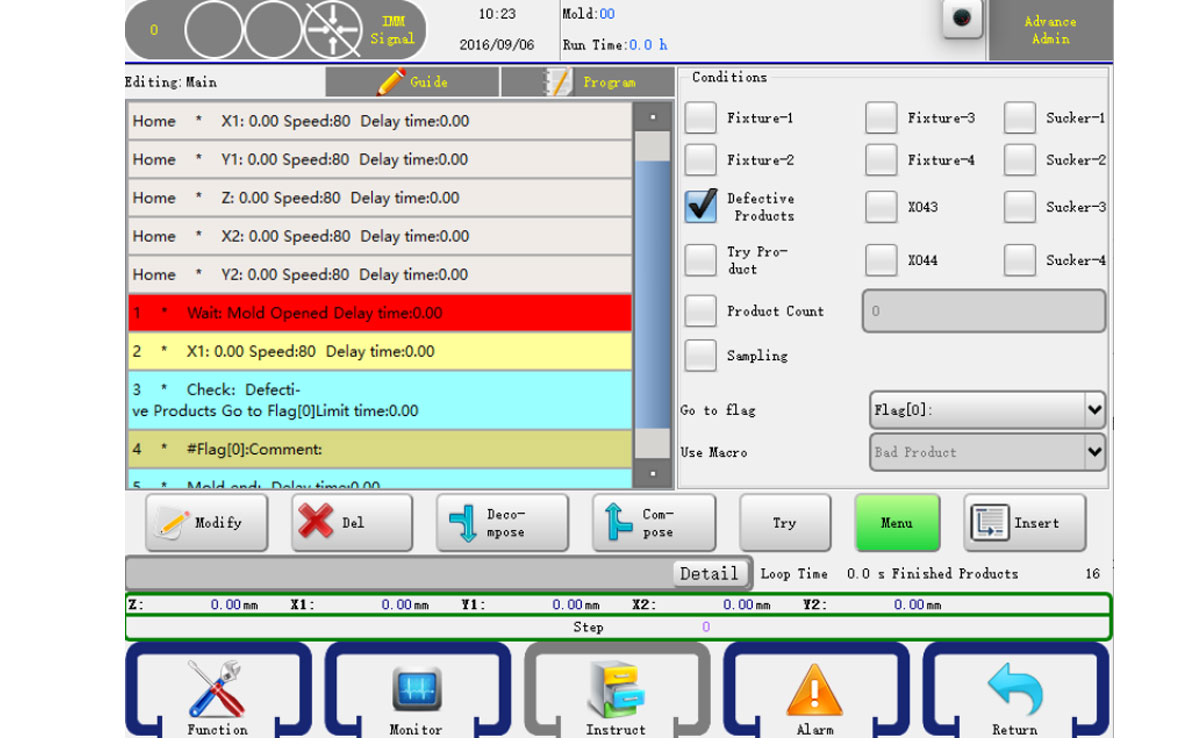
Atención: El programa debe tener un Comentario para utilizar las condiciones.
6.2.11 Modificar programa
Seleccione el paso que desea modificar y luego haga clic en el botón Modificar. Se abrirá el cuadro de diálogo de modificación, como se muestra a continuación:
Puede modificar la configuración de la acción y presionar OK para confirmar.
6.3 Demostración
El siguiente procedimiento le ayudará a aprender y practicar la programación de robots. En el programa de robot de moldeo real, según su situación, configure la posición del servoeje y la secuencia correcta con la máquina de moldeo por inyección.
6.3.1 Comando
El procedimiento utilizado para recoger productos y alimentar la cola consiste en que el robot permanece en la parte superior de la máquina de moldeo por inyección y espera la señal de apertura del molde. Cuando el molde se abre, los brazos bajan y recogen los productos y el canal, que luego bajan a la trituradora y depositan el producto en la cinta transportadora, que se mueve en cada ciclo de moldeo.
6.3.2 Acciones
> Activar modo automático.
> Los brazos se desplazan al punto de inicio esperando la señal de apertura del molde.
> Succión 1 para producto, fijación 1 para canal.
> Los brazos salen de la máquina de moldeo por inyección y activan la señal de cierre del molde.
> Soltar canal.
> Bajar el producto del transportador y comenzar a moverse durante 3 segundos.
> Los brazos vuelven a la posición de espera.
6.3.3 Programa
Home X1: 0.0 Speed: 30 Delay time: 0.00
Home Y1: 0.0 Speed: 30 Delay time: 0.00
Home Z: 0.0 Speed: 30 Delay time: 0.00
Home X2: 0.0 Speed: 30 Delay time: 0.00
Home Y2: 0.0 Speed: 30 Delay time: 0.00
Home Vertical Posture Delay time: 0.00
- Wait: Mold Opened Delay time: 0.00
- Y1: 850.0 Speed: 90 Delay time: 0.00
- X1: 400.0 Speed: 90 Delay time: 0.00
- Y2: 850.0 Speed: 90 Delay time: 0.00
- X2: 400.0 Speed: 90 Delay time: 0.00
- Sucker1 On Delay time: 0.00
- X1: 0.0 Speed: 90 Delay time: 0.35
- Y1: 0.0 Speed: 90 Delay time: 0.00
- X2: 0.0 Speed: 90 Delay time: 0.35
- Y2: 0.0 Speed: 90 Delay time: 0.00
- Sucker1 Begin-cut
- Lock Mold On Delay time: 0.00
- Horizontal posture Delay time: 0.00
- Z: 1000.0 Speed: 90 Delay time:0.00
- Y1: 800.0 Speed: 90 Delay time: 0.00
- Y2: 800.0 Speed: 90 Delay time: 0.00
- Sucker1 OFF Delay time:0.00
- Y1: 0.0 Speed: 90 Delay time: 0.25
- Y2: 0.0 Speed: 90 Delay time:0.25
- Conveyor On Times: 1 Action time: 3.00
- Z: 0.0 Speed: 90 Delay time: 0.00
- Vertical posture Delay time: 0.00
- Mold End Delay time:0.00







