
Instrucciones de instalación de los brazos robóticos SWITEK para máquinas de moldeo por inyección - Capítulo 5: Operación
Abstracto
Manual, parada y automático son tres estados operativos de los brazos robóticos para máquinas de moldeo por inyección, que el operador puede seleccionar mediante el interruptor situado en la parte superior izquierda del controlador manual. En este capítulo, analizaremos cómo operar y programar el brazo robótico durante las pruebas, la programación, la parametrización y su funcionamiento automático.
5.1 Posición de origen devuelta
Para que el robot pueda funcionar correctamente de forma automática tras encenderlo, se necesita un retorno a la posición de origen (ORI), lo que hace que el robot regrese a la posición inicial para cada eje, y que la ventosa y el dispositivo de fijación vuelvan a la posición cerrada.
En el modo de parada, presione el botón "Inicio" una vez y luego el botón "Inicio" para regresar a la posición inicial con cada eje Y1(Y2), X1(X2) y Z en orden. Al mismo tiempo, aparecerá un cuadro de página para recordarle que la operación OPR está en curso y que todos los ejes eléctricos vuelven a su posición original en 0.
Cuando todos los ejes, la ventosa y el dispositivo de fijación regresen a la posición inicial, aparecerá un icono en la esquina superior derecha de la pantalla.  , que permite operar en modo automático y manual.
, que permite operar en modo automático y manual.
No se puede operar de forma manual, automática ni modificar la configuración durante el OPR. Presione el botón de parada o el botón de parada de emergencia en caso de emergencia para detener el OPR.
5.2 Operación manual
Gire la perilla hacia la izquierda, el robot pasará al estado manual. Como se muestra a continuación:
5.2.1 Acción del eje
Los usuarios no pueden mover los brazos antes del origen establecido, pero pueden operar válvulas neumáticas.
 | Control neumático: Brazo principal hacia arriba con presión una vez Control eléctrico: Brazo principal hacia arriba al presionar. El movimiento se detiene al soltar la presión. |
 | Control neumático:Brazo principal hacia abajo al presionarlo una vez. Control eléctrico: El brazo principal se baja al presionarlo. El movimiento se detiene al soltarlo. |
 | Control neumático:El brazo de la prensa se levanta al presionarlo una vez. Control eléctrico: Brazo de prensa con presión. El movimiento se detiene al soltar la presión. |
 | Control neumático:Brazo de prensa hacia abajo al presionarlo una vez. Control eléctrico: El brazo de la prensa baja al presionar. El movimiento se detiene al soltar la presión. |
 | Control neumático:Brazo principal hacia atrás al presionarlo una vez. Control eléctrico: El brazo principal se mueve hacia atrás al presionarlo. El movimiento se detiene al soltarlo. |
 | Control neumático:Brazo principal hacia adelante con presión una vez. Control eléctrico: Brazo principal hacia adelante al presionar. El movimiento se detiene al soltar la presión. |
 | Control neumático:Brazo secundario hacia atrás al presionarlo una vez. Control eléctrico: El brazo auxiliar se mueve hacia atrás al presionarlo. El movimiento se detiene al soltarlo. |
 | Control neumático:Brazo secundario hacia adelante con presión una vez. Control eléctrico: El brazo auxiliar se mueve hacia adelante al presionar. El movimiento se detiene al soltar la presión. |
 | Control neumático:La postura se gira a la posición vertical al presionar una vez. Control eléctrico: La postura se mueve hacia la posición vertical al presionar. El movimiento se detiene al soltar la presión. |
 | Control neumático:La postura del brazo robótico gira a la posición horizontal al presionarlo una vez. Control eléctrico: El brazo robótico se coloca horizontalmente al presionarlo. El movimiento se detiene al soltarlo. |
 | Travesía en |
 | Travesía hacia afuera |
5.2.2 Acción del accesorio
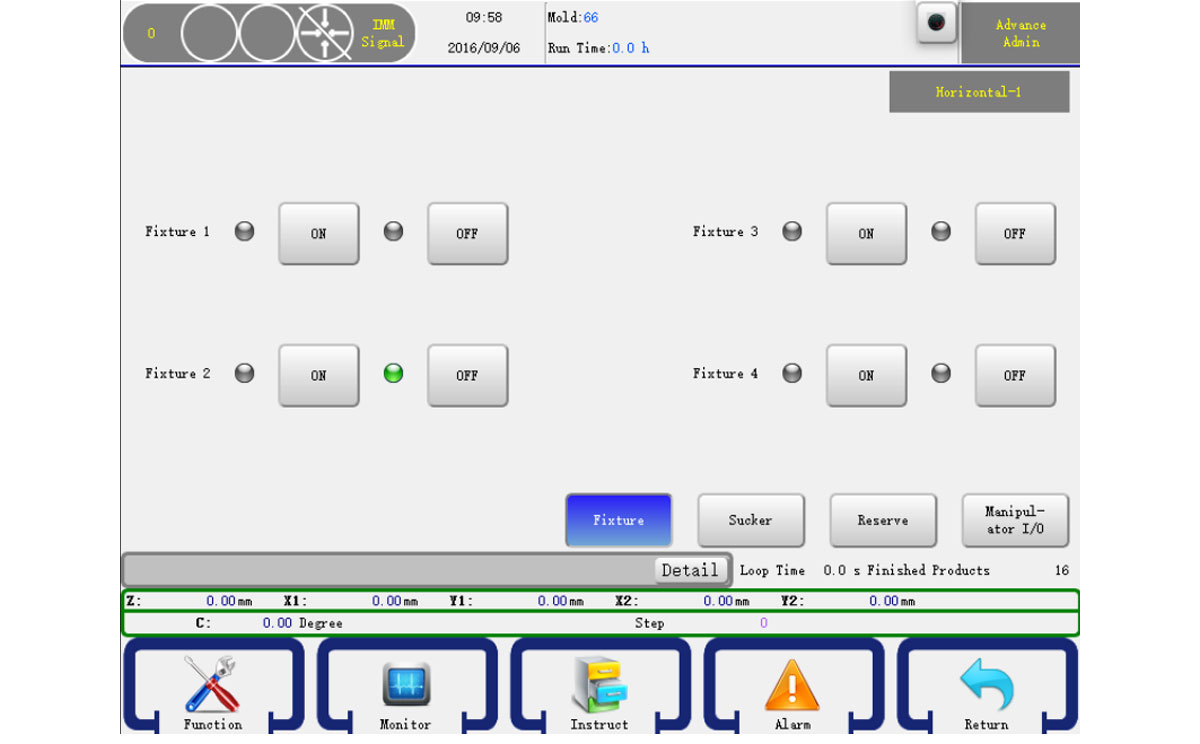
En la página del manual, haga clic en el botón Accesorio en la parte inferior derecha para ir a la página del accesorio manual como se muestra a continuación:
Hay cuatro dispositivos. Pulse el botón de encendido para encenderlo y el botón de apagado para apagarlo.
Atención: La señal de entrada se muestra en rojo y la de salida en verde. El indicador de entrada o salida se apaga si no hay señal.
5.2.3 Acción de ventosa
En la página del manual, haga clic en el botón [Sucker] en la esquina inferior derecha para acceder a la página del manual, como se muestra a continuación:
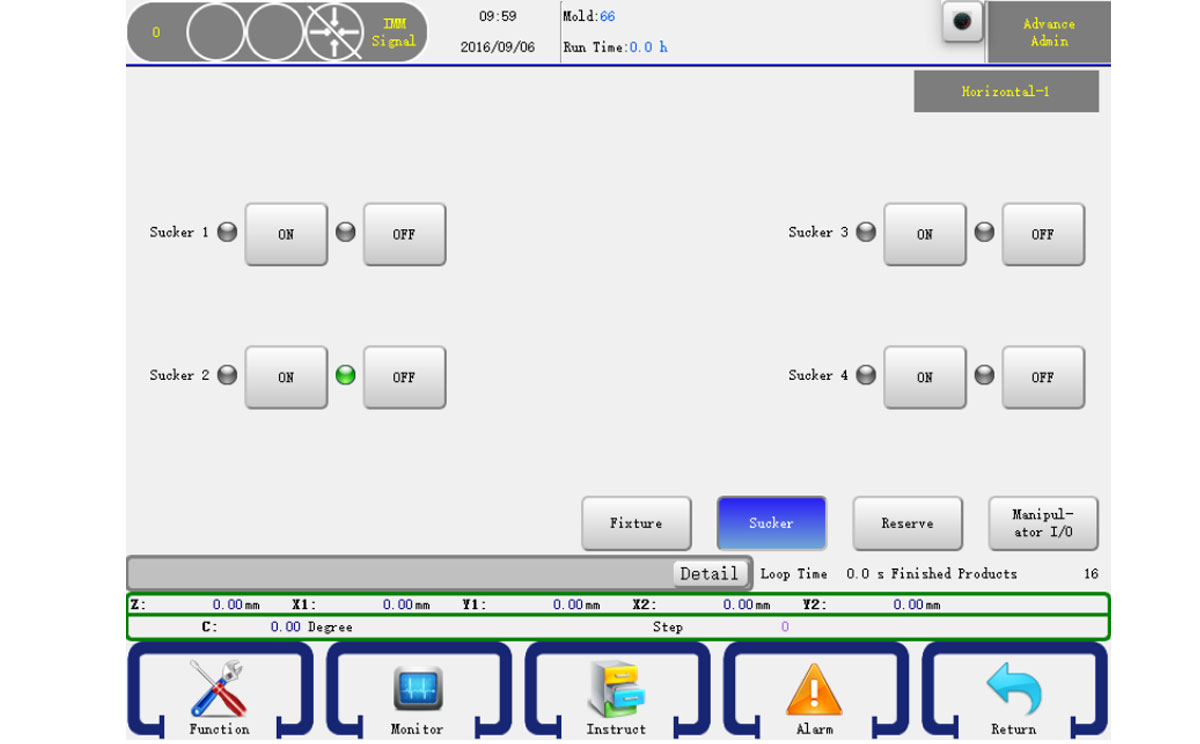
Hay cuatro ventosas. Presiona el botón de encendido para encenderlo y el de apagado para apagarlo.
Atención: La señal de entrada se muestra en rojo y la de salida en verde. El indicador de entrada o salida se apaga si no hay señal.
5.2.4 Acción auxiliar
En la página del manual, haga clic en el botón Otro en la parte inferior derecha para ir a la otra página del manual como se muestra a continuación:
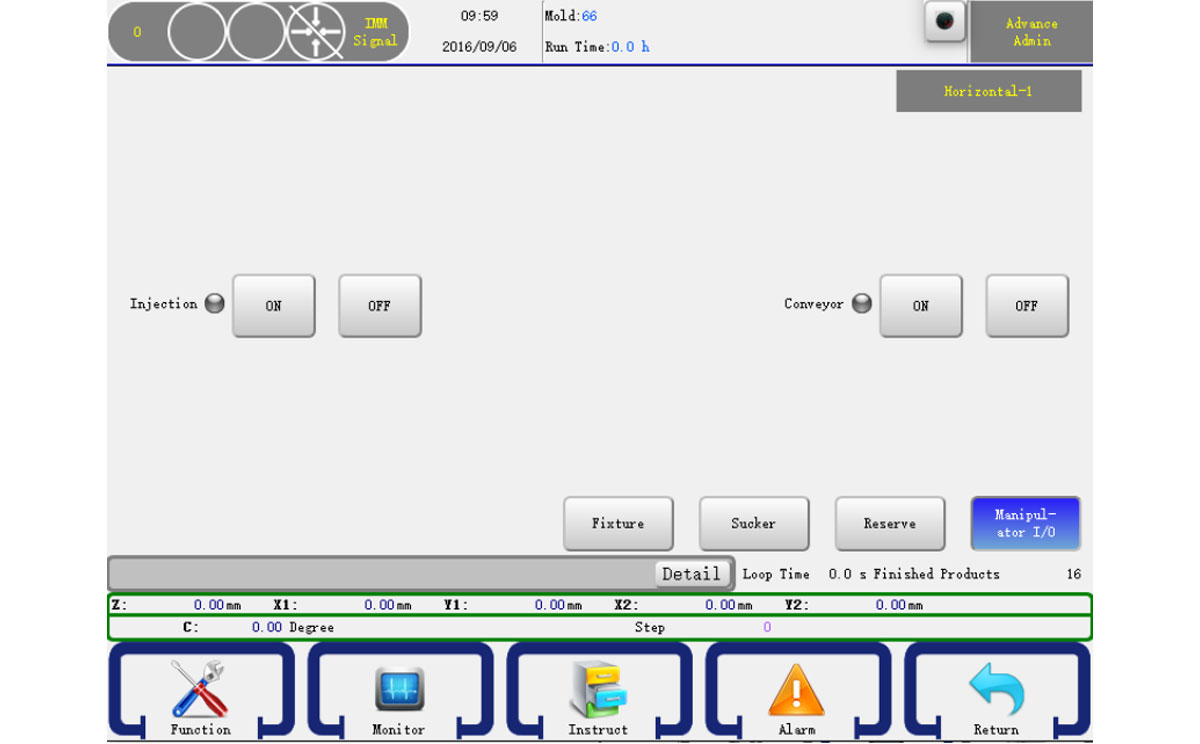
El funcionamiento es el mismo que el de Fixture
5.2.5 Acción de reserva
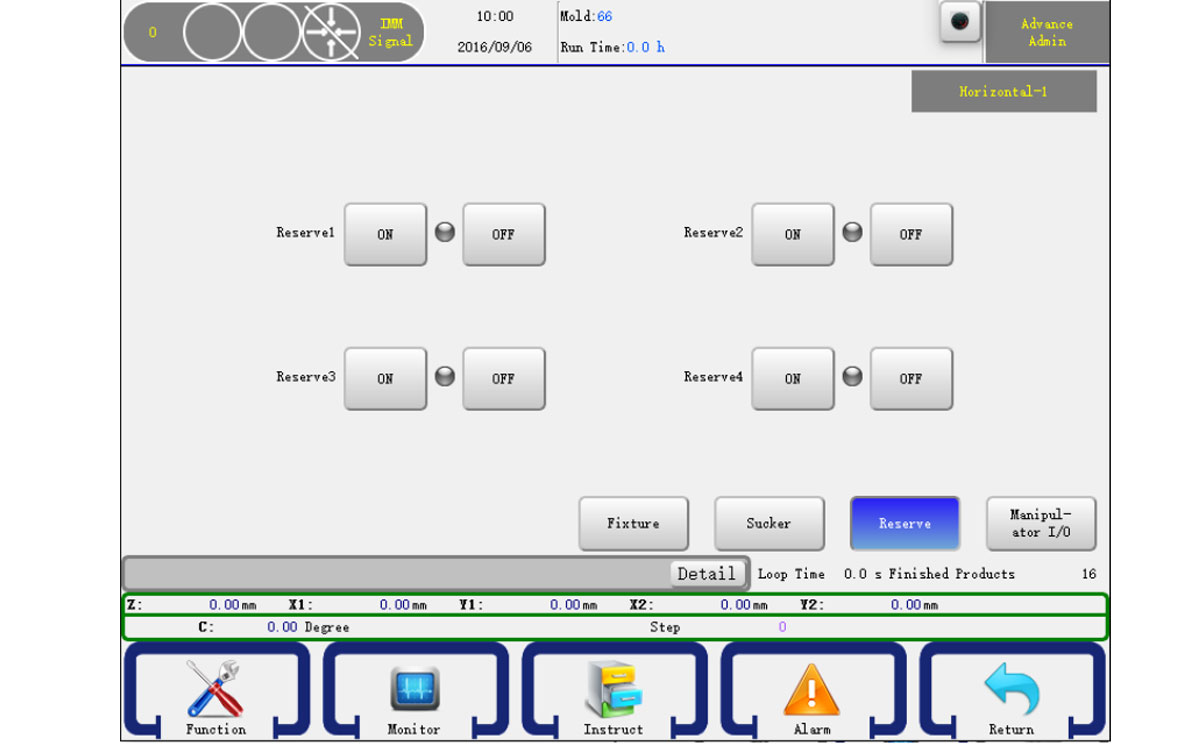
El funcionamiento es el mismo que el de Fixture
5.3 Modo automático
5.3.1 Supervisar el estado de ejecución automática
Gire la perilla hacia la derecha para acceder a la página de ejecución automática. El robot pasará al estado de preparación automática. En este estado, al pulsar el botón de inicio, el robot pasará al estado de ejecución automática. Puede supervisar el estado de ejecución, como se muestra a continuación.
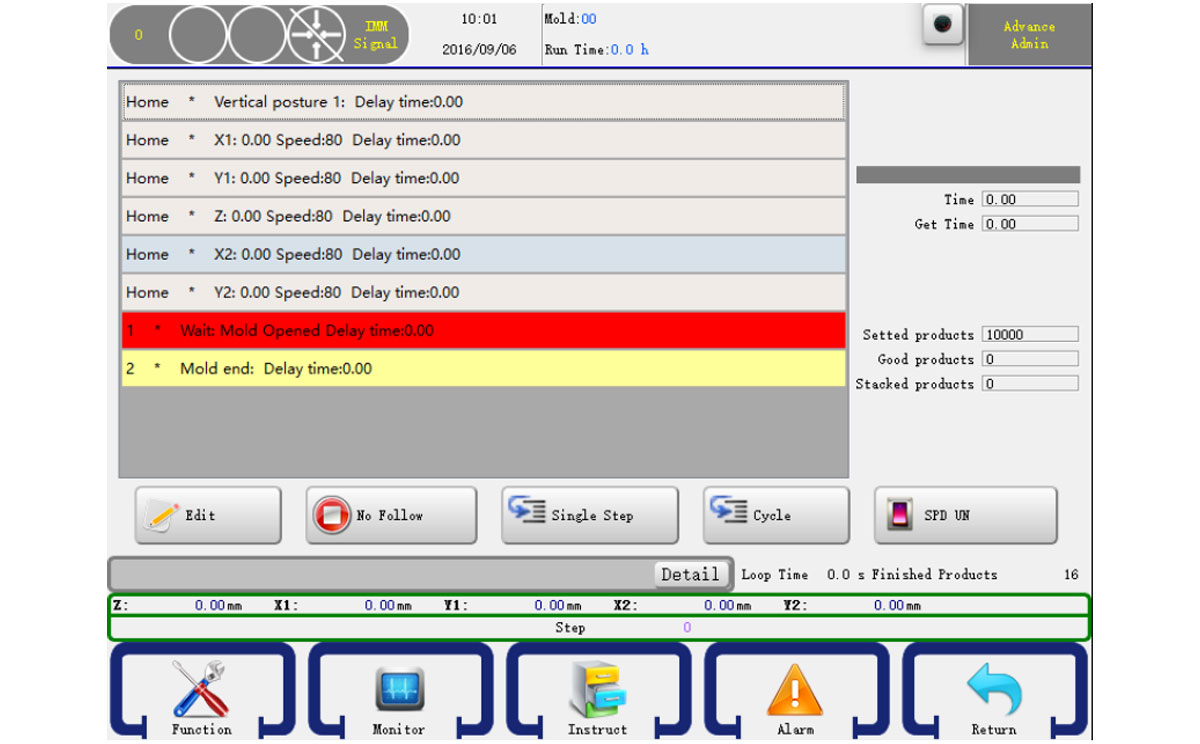
- Periodo: Tiempo de suspensión en el ciclo de ejecución automática.
- Tiempo de extracción: El tiempo que tardó el robot en coger y sacar el producto en el Auto.
- Productos configurados: Cantidad de producto por conjunto. La alarma se activa cuando se alcanza el contador de productos.
- Calificado: El número de piezas extraídas por el brazo robótico.
- Número de apilamiento: La cantidad de productos que el robot ha apilado.
- Tiempo de bucle: El tiempo después de un ciclo de ejecución en el Auto.
- Conteo terminado: El número de productos terminados.
5.3.2 Ajustar configuraciones en ejecución
En el estado de ejecución automática, puede modificar la configuración del programa. Simplemente seleccione un paso y haga clic en el botón "Editar". Se abrirá un cuadro de diálogo. Al hacer clic en "Aceptar", se aceptarán los datos y el siguiente ciclo se ejecutará según su configuración. Si pulsa "Cancelar", cancelará la operación.
Para garantizar que estos ajustes no dañen el robot, la máquina ni el molde, se permite un rango de 5 mm. Como se muestra a continuación:
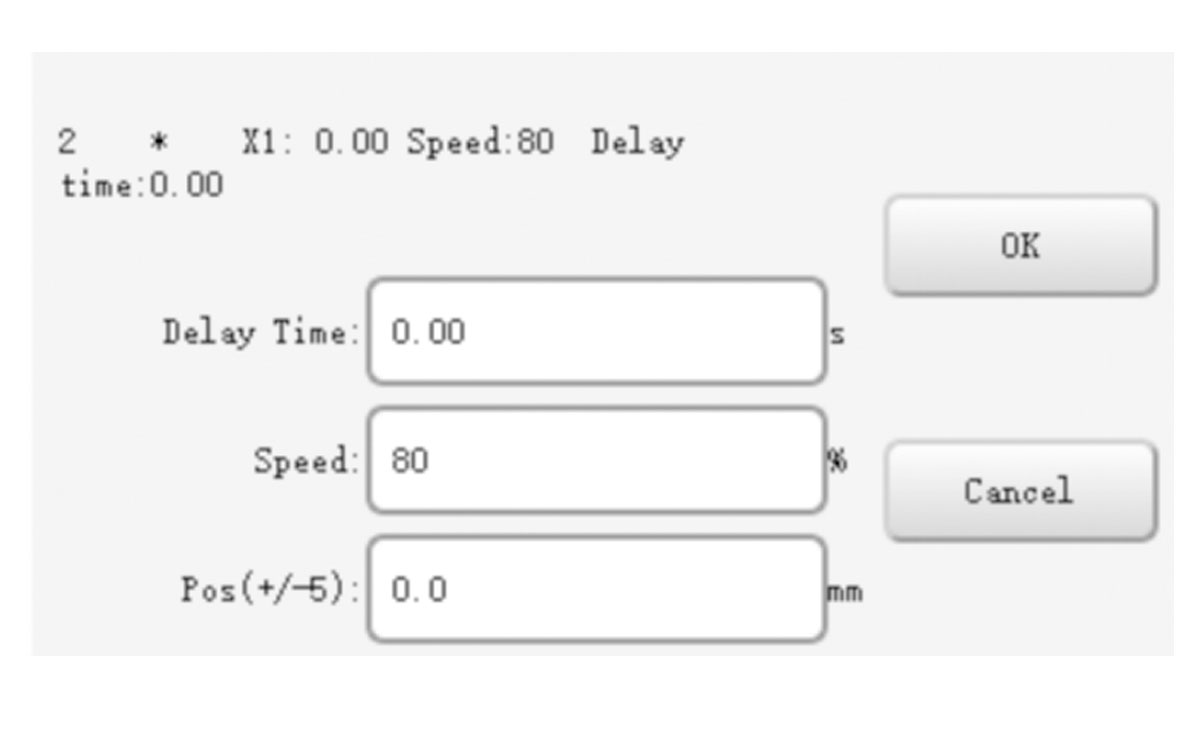
Una vez que haya terminado, simplemente haga clic en el botón Aceptar para confirmar el cambio.
5.3.3 Carrera de un solo paso
En el estado de ejecución automática, puede hacer clic en un solo botón para ejecutar un paso. Al hacer clic de nuevo, se ejecutará el siguiente paso, y así sucesivamente. Esta función es muy útil para depurar su programa.
5.3.4 Ajuste de velocidad
Haga clic en el botón "Velocidad" para que se convierta en "Visualización de velocidad" y ajuste la velocidad general presionando "Ajuste de velocidad" en el teclado y el panel de la esquina inferior izquierda.







