
sales06@switek.biz

+86 186 5927 5869

Subscript to Us
sales06@switek.biz
+86 186 5927 5869
Subscript to Us
Keywords:Panasonic A6 Servo Installation Instruction, Panasonic A6 Driver, Panasonic A6 Series Servo Motor Manual
The setting of the command division and multiplication ratio is the promise of an efficient automation system driven by a Panassonic A6 series of AC servo motor and driver. Here in this chapter we're discussing the relation between Electronic Gear and Position Resolution or Travelling Speed.
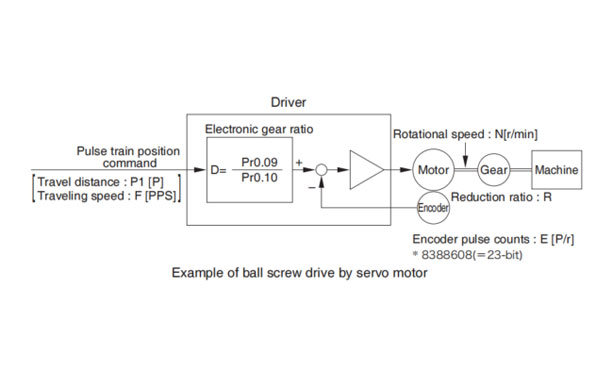
Here we take a ball screw drive as an example of machine.
A travel distance of a ball screw M[mm] corresponding to travel command P1[P], can be described by the following formula (1) by making the lead of ball screw as L[mm]
M=P1 x (D/E) x (1/R) x L ……………(1)
therefore, position resolution (travel distance ΔM per one command pulse) will be described by the formula(2)
ΔM = (D/E) x (1/R) x L ……………(2)
modifying the above formular (2), electronic gear ratio can be found in the formula (3).
D=(ΔM x E x R) x L ……………(3)
Actual travelling velocity of ball screw, V[mm/s] can be described by the formula (4) and the motor rotational speed, N at that time can be described by the formula (5).
V=F x (D/E) x (1/R) x L ……………(4)
N=F x (D/E)/(F x 60) ……………(5)
modifying the above formula (5), electronic gear ratio can be found in the formula (6).
D=(N x E)/(F x 60) ……………(6)
Note →
| 2n | Decimal |
|---|---|
| 20 | 1 |
| 21 | 2 |
| 22 | 4 |
| 23 | 8 |
| 24 | 16 |
| 25 | 32 |
| 26 | 64 |
| 27 | 128 |
| 28 | 256 |
| 29 | 512 |
| 210 | 1024 |
| 211 | 2048 |
| 2n | Decimal |
|---|---|
| 212 | 4096 |
| 213 | 8192 |
| 214 | 16384 |
| 215 | 32768 |
| 216 | 65536 |
| 217 | 131072 |
| 218 | 262144 |
| 219 | 524288 |
| 220 | 1048576 |
| 221 | 2097152 |
| 222 | 4194304 |
| 223 | 8388608 |
| Electronic gear ratio D=ΔM x E x R/L | D=Pr0.09/Pr0.10 | |
|---|---|---|
| Lead of ball screw, L=10mm Gear reduction ratio, R=1 Position resolution, ΔM = 0.005mm Encoder, 23-bit (E=223P/r) | 0.0005 x 223 x 1/10 = 5 x 223/10 x 104 = 41943040/100000 | Pr0.09 = 41943040 Pr0.10 = 100000 |
| Motor rotational speed (r/min), N = F x D/E x 60 | ||
|---|---|---|
| Lead of all screw, L=20 mm Gear reduction ration, R=1 Position resolution, ΔM = 0.0005mm Line driver pulse input, 500 kpps Encoder, 23-bit | 500000 x 0.0005 x 223 x 1/20 x 1/223 x 60 = 750 | |
| Ditto To make it to 2000 r/min | Electronic gear ratio D = N x E/F x 60 | D = Pr0.09/Pr0.10 |
| D = 2000 x 223/500000 x 60 = 2000 x 223/2000 x 500 x 30 = 8388608/15000 | Pr0.09 = 8388608 Pr0.10 = 15000 | |
| Travel distance per command pulse (mm) (Position resolution) ΔM = D/E x 1/R x L | ||
| 2000 x 223/500000 x 60 x 1/223 x 1/1 x 20 = 0.00133 mm | ||
Related page → • P.4-10 "Details of Parameter"
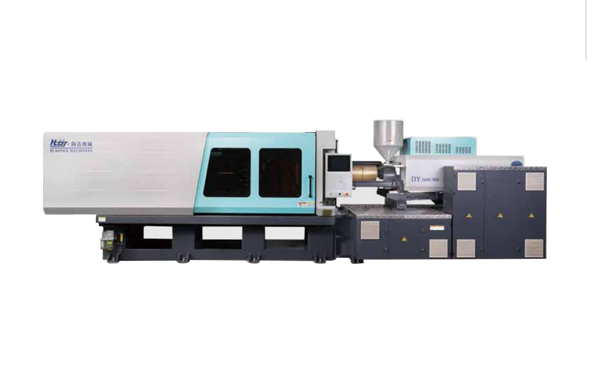
HD170LDY -- HaiDa Hybrid Injection Molding Machine
| No. | Name | Value |
|---|---|---|
| 1 | Clamping Force | 1700 kN |
| 2 | Shot Weight | 147 g |
| 3 | Shot Speed | 200 mm/s |
| 4 | Screw Diameter | 36 mm |
| 5 | Opening Stroke | 440 mm |
| 6 | Space Between Tie Bars | 470 x 470 mm |
| 7 | Mold Thickness (Min) | 200 mm |
| 8 | Mold Thickness (Max) | 520 mm |
| 9 | Pumper Motor | 56 kW |
| 10 | Heating Capacity | 11 kW |
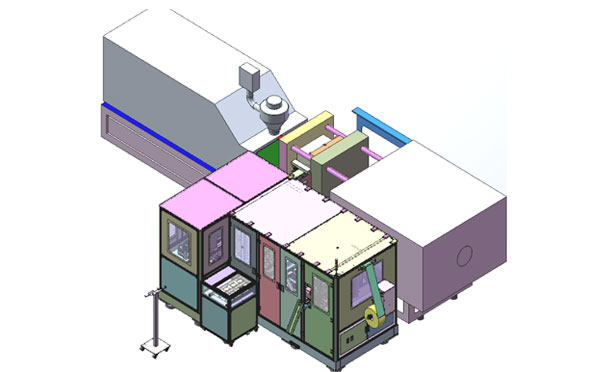
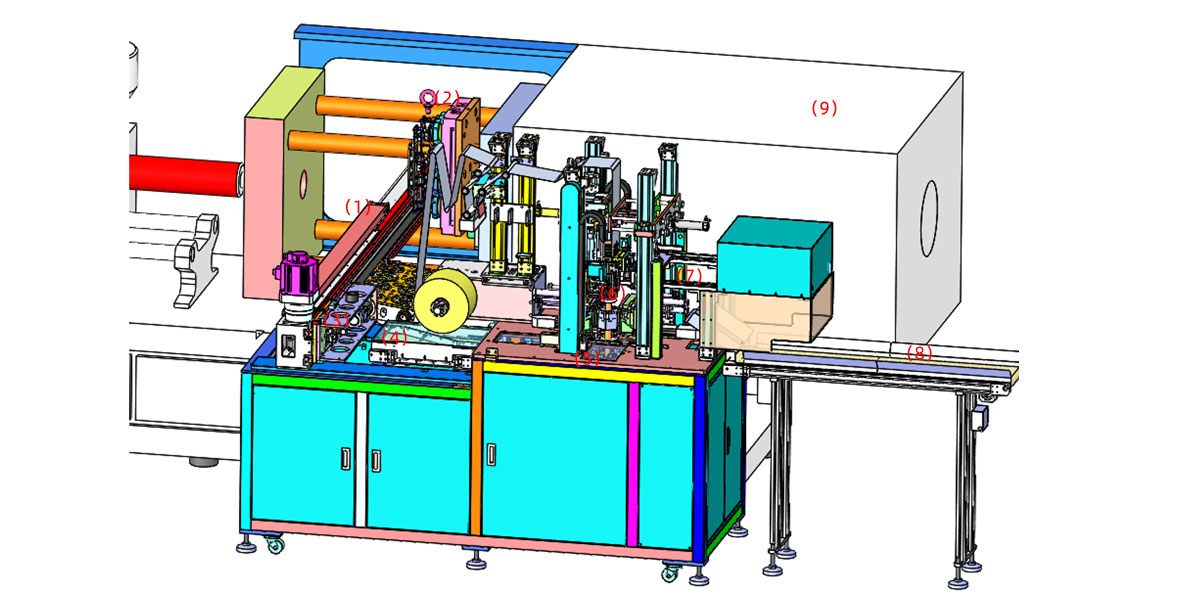
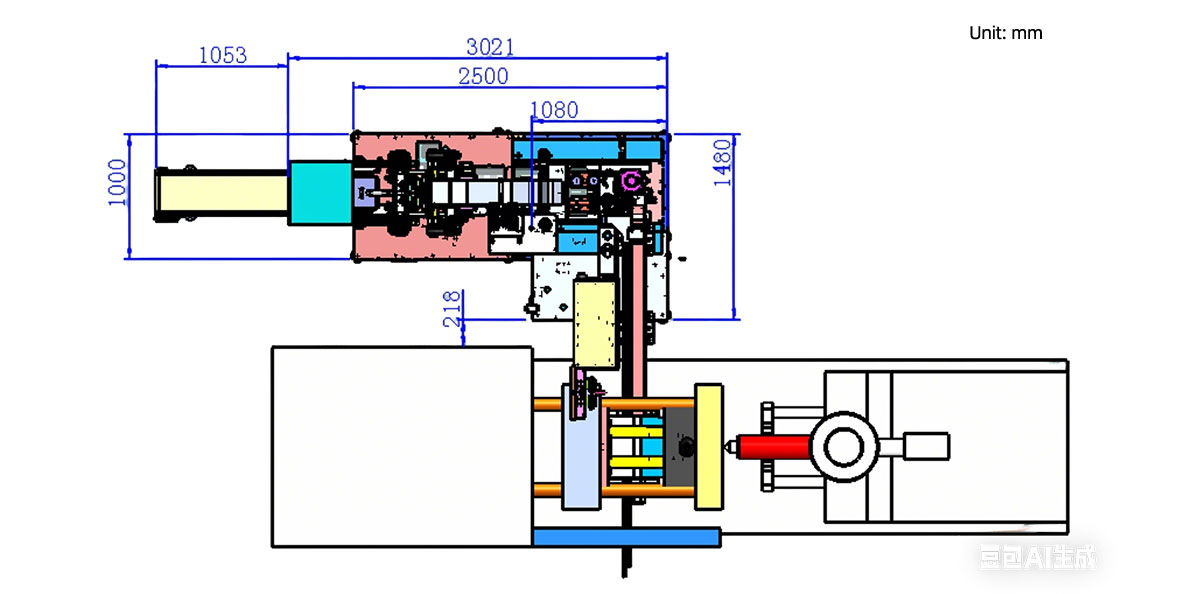
The SWITEK side entry petri dish packing system is a custom made automation system for the stable production of laboratory consumable plastic petri dish with the picking robot, the petri dish assembly, stacking, packing unit etc. integrated as auniformed system for the efficient and stable production of the petri dish. The system can be custome made for a petri dish mold layout design of 2+2, 4+4, 6+6, 8+8 etc.
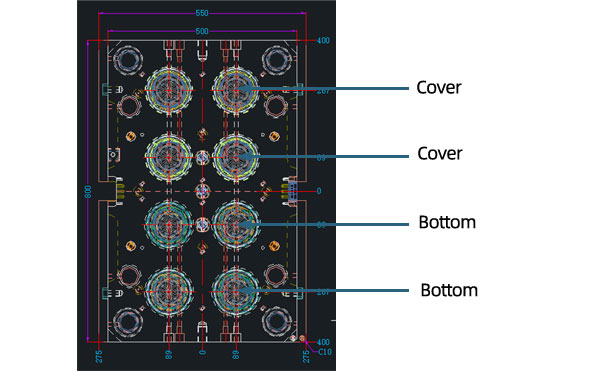
Mold Layout Deisgn
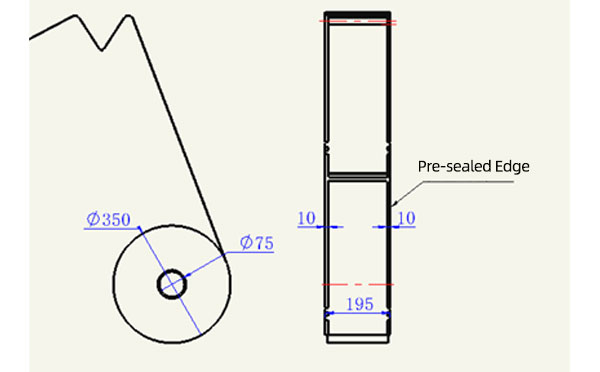
Sleeve Size for Package with Vacuum Request
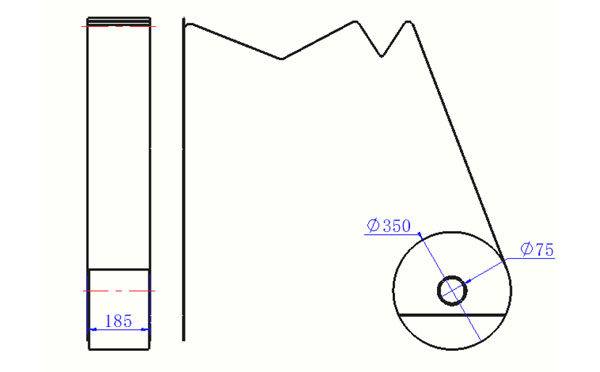
Sleeve Size for Package without Vacuum Request
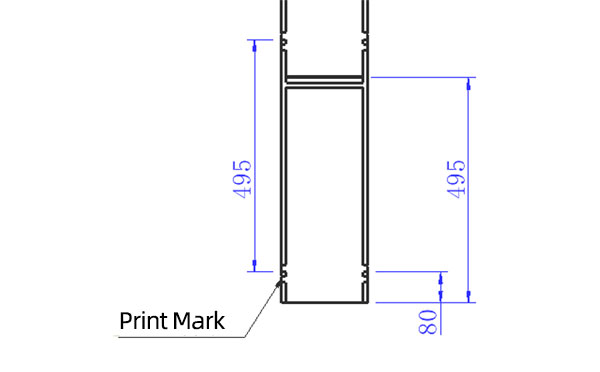
Sleeve (With Mark) Size for Package with Vacuum Request
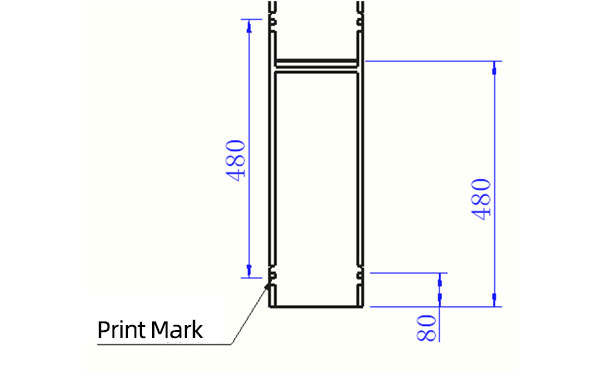
Sleeve (With Mark) Size for Package without Vacuum Request
I think you'll have an overall understanding about the SWITEK top/side entry petri dish packing system. If you still have any other question about it or need any help in your petri dish production project, please feel free to contact SWITEK laboratory consumable plastic parts injection molding solutions team for more information.
HuangYanZheng©Copy Right


